TGeo plugin¶
General¶
The TGeo plugin connects a geometry described with the ROOT::Geom module with Acts. This is done by parsing the ROOT geometry and selecting TGeoNode objects that represent chosen geometrical objects.
Acts detector elements are represented by surfaces with dedicated shapes, hence a conversion of the volume based TGeoNode description into Acts::Surface objects needs to take place.
Parsing the ROOT Geometry¶
Once a geometry is imported in ROOT, it can be accessed via the gGeoManager. The Acts::TGeoLayerBuilder relies on the fact that this gGeoManager is accessible, if it points to nullptr, obviously no conversion is done.
The Acts::TGeoLayerBuilder can hereby be configured to search within given parsing ranges for TGeoNode objects to be converted into Acts::Surface objects. A vector of search strings can be used for situations where multiple sensor types are used or additional objects are bound to be described.
A dedicated Acts::TGeoParser struct is then used to select the nodes from the ROOT geometry.
Conversion of TGeoShapes to Acts::Surfaces¶
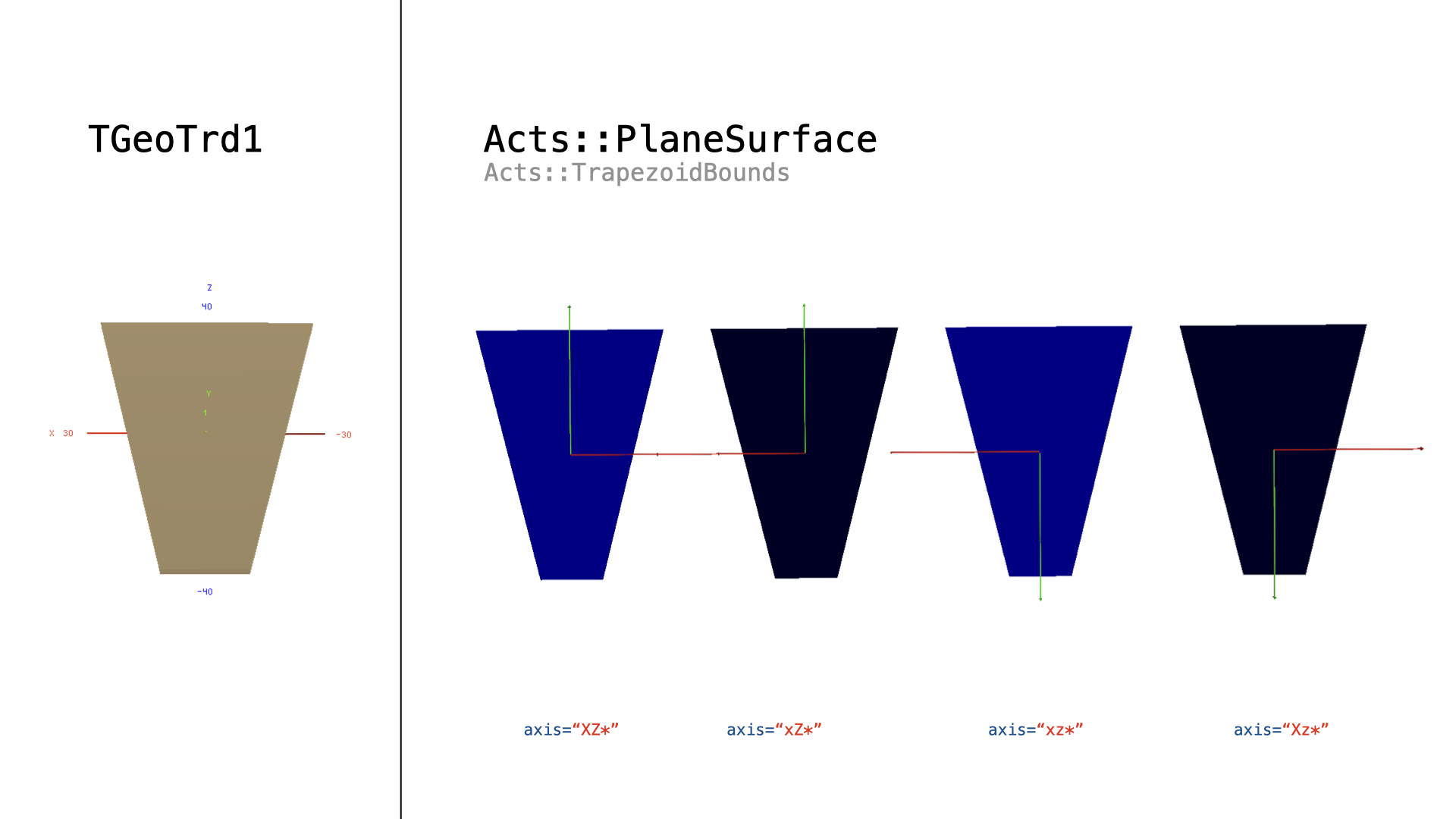
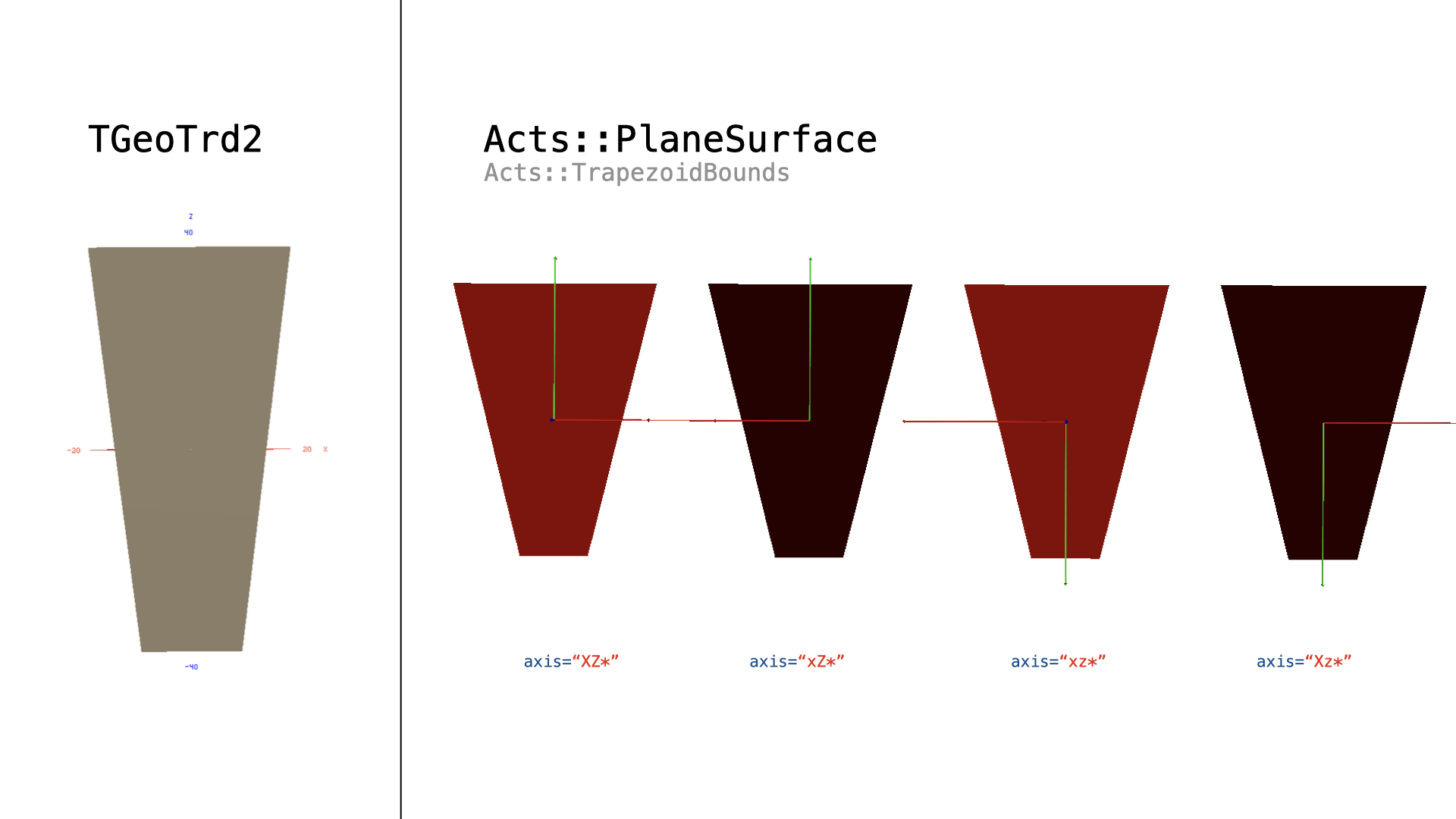
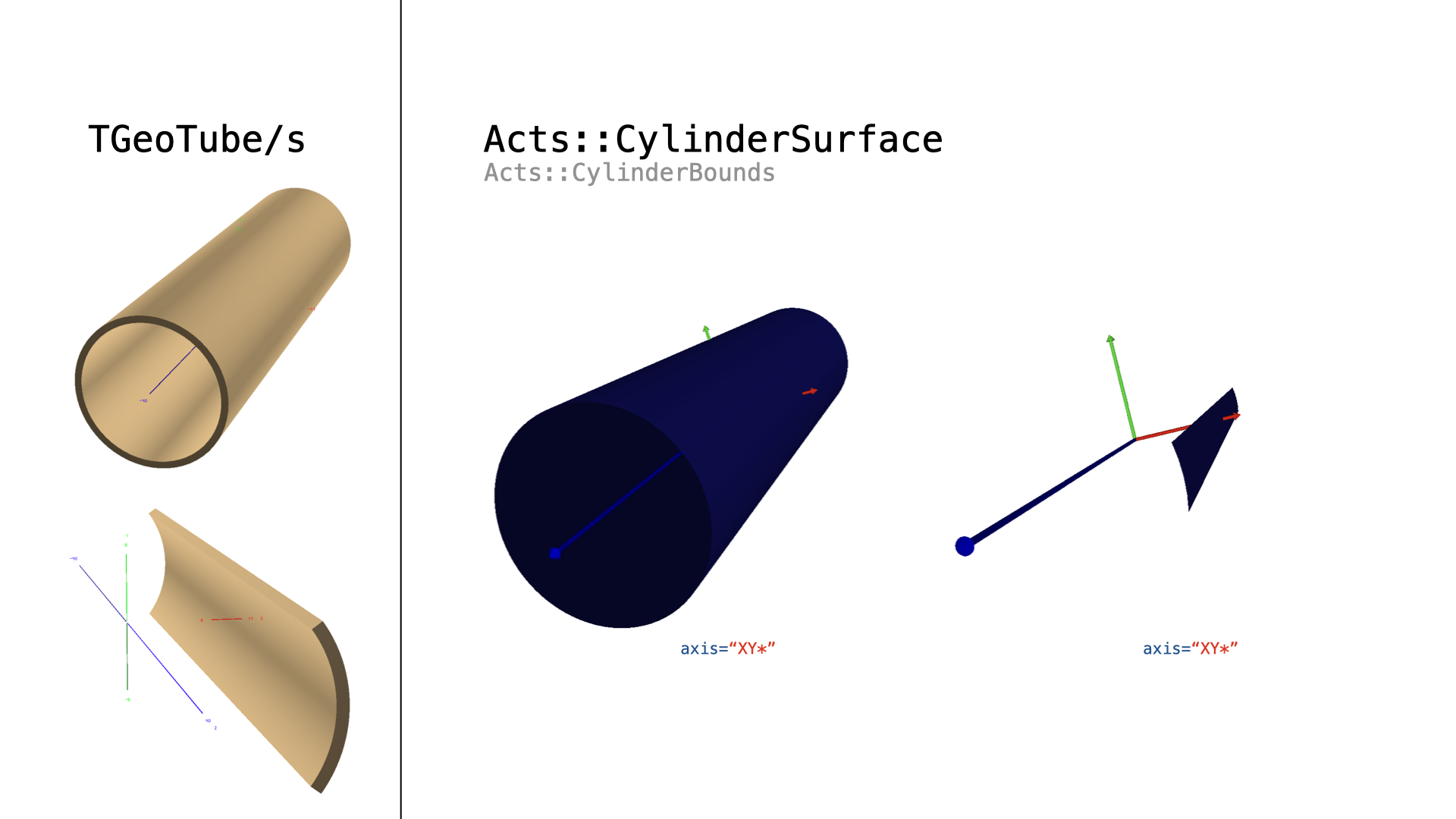
An automatic translation of TGeoShape objects into corresponding Acts::Surface objects with appropriate bound descriptions is done by the Acts::TGeoSurfaceConverter class.
There is some limited freedom in re-defining the orientation of the coordinate system between ROOT and Acts which can be used to adapt local coordinate definitions on the converted objects.
This is indicated by the const std::string& axes argument of the converter.
- The nomenclature/convention is the following:
the resulting local cartesian coordinate system must by right-handed: this is guaranteed by the fact that the third local axis is contructed as a cross product of the first two local axis
defining the new local axes with respect to the
TGeodefinition is done by naming the new axes in order, e.g. an unchanged coordinate system has the tagXYZ, orXY*, as the third axis is defined by the first two onesflipping the direction of a axis is done by lower capital, e.g.
yZ*redefines the negative y-axis of theTGeoMatrixas the (obvisouly) positive x-axis of theActs::Transform3and redefines the positive z-axis of theTGeoMatrixas corresponding y-axis of theActs::Transform3
In case a translation request is malformed, a std::exception is thrown, indicating the problem.
Examples of supported TGeoShape transformations to Acts::Surface objects can be found in the Tests/UnitTests/Plugins/TGeo unit test suite, a summary of the output can be seen below: