API Reference
Classes
-
class AnnulusBounds : public Acts::DiscBounds
Class that implements a (potentially asymmetric) bounds with difference between surface bound center and surface coordinate center.
These bounds combine two different systems:
module system : radial bounds centred on the moduleOrigin
strip system : phi bounds centred on the stripOrigin
The measurement will be done in the strip system, with r/phi local coordinates.
Public Types
Public Functions
-
explicit AnnulusBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from fixed size array.
- Parameters:
values – The bound values stored in a fixed size array
-
inline explicit AnnulusBounds(double minR, double maxR, double minPhiRel, double maxPhiRel, const Vector2 &moduleOrigin = {0, 0}, double avgPhi = 0) noexcept(false)
Default constructor from parameters.
Note
For
moriginyou need to actually calculate the cartesian offset- Parameters:
minR – The inner radius of the annulus
maxR – The outer radius of the annulus
minPhiRel – The minimum phi relative to average phi
maxPhiRel – The maximum phi relative to average phi
moduleOrigin – The origin of the module in the strip frame
avgPhi – The average phi value
-
inline virtual double binningValuePhi() const final
Return a reference phi for binning.
- Returns:
Average phi angle for binning purposes
-
inline virtual double binningValueR() const final
Return a reference radius for binning.
- Returns:
Average radius for binning purposes
-
virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For AnnulusBounds: returns pre-calculated center from corner vertices in strip polar coordinates (r, phi), accounting for average phi rotation
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
std::vector<Vector2> corners() const
This method returns the four corners of the bounds in polar coordinates Starting from the upper right (max R, pos locX) and proceeding clock-wise i.e.
(max R; pos locX), (min R; pos locX), (min R; neg loc X), (max R: neg locX)
- Returns:
Vector of corner points in polar coordinates
-
inline virtual bool coversFullAzimuth() const final
Returns true for full phi coverage.
- Returns:
True if the annulus covers the full azimuthal range, false otherwise
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The value of the specified bound parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool insideRadialBounds(double R, double tolerance = 0.) const final
Checks if this is inside the radial coverage given the a tolerance.
- Parameters:
R – The radius value to check
tolerance – The tolerance for the check
- Returns:
True if the radius is within bounds (plus tolerance), false otherwise
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
Vector2 moduleOrigin() const
Returns moduleOrigin, but rotated out, so
averagePhiis already considered.The module origin needs to consider the rotation introduced by
averagePhi- Returns:
The origin of the local frame
-
inline double phiMax() const
Returns the left angular edge of the module.
- Returns:
The left side angle
-
inline double phiMin() const
Returns the right angular edge of the module.
- Returns:
The right side angle
-
inline virtual double rMax() const final
This method returns outer radius.
- Returns:
Maximum radius of the annulus
-
inline virtual double rMin() const final
This method returns inner radius.
- Returns:
Minimum radius of the annulus
-
virtual std::ostream &toStream(std::ostream &sl) const final
Outstream operator.
- Parameters:
sl – is the ostream to be dumped into
- Returns:
Reference to the output stream
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
virtual std::vector<Vector2> vertices(unsigned int quarterSegments = 2u) const override
This method returns the xy coordinates of the four corners of the bounds in module coordinates (in x/y), and if quarterSegments is bigger or equal to 0, the curved part of the segment is included and approximated by the corresponding number of segments.
Starting from the upper right (max R, pos locX) and proceeding clock-wise i.e. (max R; pos locX), (min R; pos locX), (min R; neg loc X), (max R: neg locX)
- Parameters:
quarterSegments – the number of segments used to approximate a quarter of a circle
- Returns:
vector for vertices in 2D
Warning
doxygenclass: Cannot find class “Acts::AnyCharge” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygenclass: Cannot find class “Acts::AtlasBetheHeitlerApprox” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
class AtlasStepper
the AtlasStepper implementation for the
This is based original stepper code from the ATLAS RungeKuttaPropagator
Public Types
-
using BoundParameters = BoundTrackParameters
Type alias for bound track parameters.
-
using BoundState = std::tuple<BoundParameters, Jacobian, double>
Type alias for bound state (parameters, jacobian, path length)
-
using Covariance = BoundMatrix
Type alias for covariance matrix.
-
using Jacobian = BoundMatrix
Type alias for Jacobian matrix.
Public Functions
-
inline explicit AtlasStepper(const Config &config)
Construct AtlasStepper with configuration.
- Parameters:
config – Configuration containing magnetic field provider and other settings
Construct AtlasStepper with magnetic field provider.
- Parameters:
bField – Shared pointer to magnetic field provider
-
inline double absoluteMomentum(const State &state) const
Absolute momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Absolute momentum magnitude
-
inline Result<BoundState> boundState(State &state, const Surface &surface, bool transportCov = true, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Create and return the bound state at the current position.
- Parameters:
state – [in] State that will be presented as
BoundStatesurface – [in] The surface to which we bind the state
transportCov – [in] Flag steering covariance transport
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
- Returns:
A bound state:
the parameters at the surface
the stepwise jacobian towards it
and the path length (from start - for ordering)
-
inline double charge(const State &state) const
Charge access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Electric charge of the particle
-
inline BoundState curvilinearState(State &state, bool transportCov = true) const
Create and return a curvilinear state at the current position.
- Parameters:
state – [in] State that will be presented as
CurvilinearStatetransportCov – [in] Flag steering covariance transport
- Returns:
A curvilinear state:
the curvilinear parameters at given position
the stepweise jacobian towards it
and the path length (from start - for ordering)
-
inline Vector3 direction(const State &state) const
Get particle direction from stepper state.
- Parameters:
state – Stepper state containing track information
- Returns:
3D unit direction vector
-
inline Result<Vector3> getField(State &state, const Vector3 &pos) const
Get the field for the stepping It checks first if the access is still within the Cell, and updates the cell if necessary, then it takes the field from the cell.
- Parameters:
state – [inout] is the stepper state associated with the track the magnetic field cell is used (and potentially updated)
pos – [in] is the field position
- Returns:
Magnetic field vector at the given position or error
-
inline double getStepSize(const State &state, ConstrainedStep::Type stype) const
Get the step size.
- Parameters:
state – [in] The stepping state (thread-local cache)
stype – [in] The step size type to be returned
- Returns:
Current step size for the specified constraint type
-
inline void initialize(State &state, const BoundParameters &par) const
Initialize stepper state from bound track parameters.
- Parameters:
state – Stepper state to initialize
par – Bound track parameters containing initial conditions
-
inline void initialize(State &state, const BoundVector &boundParams, const std::optional<BoundMatrix> &cov, ParticleHypothesis particleHypothesis, const Surface &surface) const
Initialize stepper state from individual parameters.
- Parameters:
state – Stepper state to initialize
boundParams – Bound track parameter vector
cov – Optional covariance matrix
particleHypothesis – Particle hypothesis (mass, charge)
surface – Reference surface for bound parameters
-
inline State makeState(const Options &options) const
Create stepper state with given options.
- Parameters:
options – Stepper options including magnetic field context
- Returns:
Stepper state initialized with options and magnetic field cache
-
inline Vector3 momentum(const State &state) const
Get 3D momentum vector from stepper state.
- Parameters:
state – Stepper state containing track information
- Returns:
3D momentum vector
-
inline std::string outputStepSize(const State &state) const
Output the Step Size - single component.
- Parameters:
state – [inout] The stepping state (thread-local cache)
- Returns:
String representation of the current step size
-
inline double overstepLimit(const State&) const
Overstep limit.
- Returns:
Overstep limit for this stepper (negative value)
-
inline const ParticleHypothesis &particleHypothesis(const State &state) const
Particle hypothesis.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Reference to the particle hypothesis used
-
inline Vector3 position(const State &state) const
Get particle position from stepper state.
- Parameters:
state – Stepper state containing track information
- Returns:
3D position vector
-
inline bool prepareCurvilinearState(State &state) const
If necessary fill additional members needed for curvilinearState.
Compute path length derivatives in case they have not been computed yet, which is the case if no step has been executed yet.
- Parameters:
state – [inout] The stepping state (thread-local cache)
- Returns:
true if nothing is missing after this call, false otherwise.
-
inline double qOverP(const State &state) const
Get charge over momentum from stepper state.
- Parameters:
state – Stepper state containing track information
- Returns:
Charge over momentum (q/p)
-
inline void releaseStepSize(State &state, ConstrainedStep::Type stype) const
Release the Step size.
- Parameters:
state – [inout] The stepping state (thread-local cache)
stype – [in] The step size type to be released
-
inline Result<double> step(State &state, Direction propDir, const IVolumeMaterial *material) const
Perform the actual step on the state.
Note
The state contains the desired step size. It can be negative during backwards track propagation, and since we’re using an adaptive algorithm, it can be modified by the stepper class during propagation.
- Parameters:
state – [inout] State of the stepper
propDir – is the direction of propagation
material – is the optional volume material we are stepping through.
- Returns:
the result of the step
-
inline double time(const State &state) const
Time access.
- Parameters:
state – The stepping state to get time from
- Returns:
Current time coordinate
-
inline void transportCovarianceToBound(State &state, const Surface &surface, const FreeToBoundCorrection& = FreeToBoundCorrection(false)) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
- Parameters:
state – [inout] State of the stepper
surface – [in] is the surface to which the covariance is forwarded to
-
inline void transportCovarianceToCurvilinear(State &state) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
- Parameters:
state – [inout] State of the stepper
-
inline void update(State &state, const FreeVector ¶meters, const BoundVector &boundParams, const Covariance &covariance, const Surface &surface) const
The state update method.
- Parameters:
state – [inout] The stepper state for
parameters – [in] The new free track parameters at start
boundParams – [in] Corresponding bound parameters
covariance – [in] The updated covariance matrix
surface – [in] The surface used to update the pVector
-
inline void update(State &state, const Vector3 &uposition, const Vector3 &udirection, double qop, double time) const
Method to update momentum, direction and p.
- Parameters:
state – The state object
uposition – the updated position
udirection – the updated direction
qop – the updated momentum value
time – the update time
Update step size.
It checks the status to the reference surface & updates the step size accordingly
- Parameters:
state – [in,out] The stepping state (thread-local cache)
target – [in] The NavigationTarget
direction – [in] The propagation direction
stype – [in] The step size type to be set
-
inline void updateStepSize(State &state, double stepSize, ConstrainedStep::Type stype) const
Update step size - explicitly with a double.
- Parameters:
state – [inout] The stepping state (thread-local cache)
stepSize – [in] The step size value
stype – [in] The step size type to be set
-
inline IntersectionStatus updateSurfaceStatus(State &state, const Surface &surface, std::uint8_t index, Direction navDir, const BoundaryTolerance &boundaryTolerance, double surfaceTolerance, ConstrainedStep::Type stype, const Logger &logger = getDummyLogger()) const
Update surface status.
This method intersect the provided surface and update the navigation step estimation accordingly (hence it changes the state). It also returns the status of the intersection to trigger onSurface in case the surface is reached.
- Parameters:
state – [inout] The stepping state (thread-local cache)
surface – [in] The surface provided
index – [in] The surface intersection index
navDir – [in] The navigation direction
boundaryTolerance – [in] The boundary check for this status update
surfaceTolerance – [in] Surface tolerance used for intersection
stype – [in] The step size type to be set
logger – [in] Logger instance to use
- Returns:
IntersectionStatus indicating how the surface was encountered
-
struct Config
Configuration for constructing an AtlasStepper.
Public Members
-
std::shared_ptr<const MagneticFieldProvider> bField
Magnetic field provider.
-
std::shared_ptr<const MagneticFieldProvider> bField
-
struct Options : public Acts::StepperPlainOptions
Stepper options extending plain stepper settings.
Public Functions
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
Constructor from context objects.
- Parameters:
gctx – Geometry context
mctx – Magnetic field context
-
inline void setPlainOptions(const StepperPlainOptions &options)
Set plain options.
- Parameters:
options – Plain stepper options to set
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
-
struct State
Nested State struct for the local caching.
Public Functions
-
inline State(const Options &optionsIn, MagneticFieldProvider::Cache fieldCacheIn)
Constructor.
- Template Parameters:
Type – of TrackParameters
- Parameters:
optionsIn – [in] The options for the stepper
fieldCacheIn – [in] The magnetic field cache
Public Members
-
Covariance cov = Covariance::Zero()
Local covariance matrix storage.
-
const Covariance *covariance = nullptr
Pointer to external covariance matrix.
-
bool covTransport = false
Flag indicating whether covariance transport is enabled.
-
bool debug = false
Debug output the string where debug messages are stored (optionally)
-
std::size_t debugMsgWidth = 50
Width for debug message formatting.
-
std::size_t debugPfxWidth = 30
buffer & formatting for consistent output
-
std::string debugString = ""
String buffer for debug output messages.
-
MagneticFieldProvider::Cache fieldCache
It caches the current magnetic field cell and stays (and interpolates) within as long as this is valid.
See step() code for details.
-
double jacobian[eBoundSize * eBoundSize] = {}
Jacobian matrix storage for parameter derivatives.
-
double maxPathLength = 0
Maximum path length for this propagation.
-
bool mcondition = false
Flag indicating magnetic field boundary conditions.
-
bool needgradient = false
Flag indicating whether magnetic field gradients are needed.
-
bool newfield = true
Flag indicating new magnetic field evaluation needed.
-
std::size_t nSteps = 0
Total number of performed steps.
-
std::size_t nStepTrials = 0
Totoal number of attempted steps.
-
double parameters[eBoundSize] = {0., 0., 0., 0., 0., 0.}
Storage pattern of pVector /dL0 /dL1 /dPhi /the /dCM /dT X ->P[0] dX / P[ 8] P[16] P[24] P[32] P[40] P[48] Y ->P[1] dY / P[ 9] P[17] P[25] P[33] P[41] P[49] Z ->P[2] dZ / P[10] P[18] P[26] P[34] P[42] P[50] T ->P[3] dT/ P[11] P[19] P[27] P[35] P[43] P[51] Ax ->P[4] dAx/ P[12] P[20] P[28] P[36] P[44] P[52] Ay ->P[5] dAy/ P[13] P[21] P[29] P[37] P[45] P[53] Az ->P[6] dAz/ P[14] P[22] P[30] P[38] P[46] P[54] CM ->P[7] dCM/ P[15] P[23] P[31] P[39] P[47] P[55] Cache: P[56] - P[59].
-
ParticleHypothesis particleHypothesis = ParticleHypothesis::pion()
Particle hypothesis used for energy loss calculations.
-
double pathAccumulated = 0.
Accumulated path length during propagation.
-
double previousStepSize = 0.
Previous step size for overstep estimation.
-
std::array<double, 60> pVector = {}
Parameter vector for track state and derivatives.
-
bool state_ready = false
Flag indicating whether the state is ready for stepping.
-
StepperStatistics statistics
The statistics of the stepper.
-
double step = 0
Current step size.
-
ConstrainedStep stepSize
Constrained step size for adaptive integration.
-
bool useJacobian = false
Flag indicating whether Jacobian calculation is enabled.
-
inline State(const Options &optionsIn, MagneticFieldProvider::Cache fieldCacheIn)
-
using BoundParameters = BoundTrackParameters
-
template<AxisType type, AxisBoundaryType bdt = AxisBoundaryType::Open>
class Axis calculate bin indices from a given binning structure
This class provides some basic functionality for calculating bin indices for a given binning configuration. Both equidistant as well as variable binning structures are supported.
Bin intervals are defined such that the lower bound is closed and the upper bound is open.
- Template Parameters:
equidistant – flag whether binning is equidistant (
true) or not (false)
-
class BinUtility
The BinUtility class that translated global and local position into a bins of a BinnedArray, most performant is equidistant binning without a transform, however, optionally a transform can be provided, e.g.
for binning on shifted object, the transform is usually shared with the geometric object the Array is defined on, for performance reasons, also the inverse transform is stored.
Public Functions
-
inline BinUtility()
Constructor for equidistant.
-
inline explicit BinUtility(const BinningData &bData, const Transform3 &tForm = Transform3::Identity())
Constructor from BinningData directly.
- Parameters:
bData – is the provided binning data
tForm – is the (optional) transform
-
inline explicit BinUtility(const DirectedProtoAxis &dpAxis)
Create from a DirectedProtoAxis.
- Parameters:
dpAxis – the DirectedProtoAxis to be used
-
inline explicit BinUtility(const std::vector<DirectedProtoAxis> &dpAxes)
Create from several DirectedProtoAxis objects.
- Parameters:
dpAxes – the DirectedProtoAxis to be used with axis directions
-
inline explicit BinUtility(const Transform3 &tForm)
Constructor with only a Transform3.
- Parameters:
tForm – is the local to global transform
-
inline BinUtility(std::size_t bins, float min, float max, BinningOption opt = open, AxisDirection value = AxisDirection::AxisX, const Transform3 &tForm = Transform3::Identity())
Constructor for equidistant.
- Parameters:
bins – is the number of bins
min – in the minimal value
max – is the maximal value
opt – is the binning option : open, closed
value – is the axis direction : AxisX, AxisY, AxisZ, etc.
tForm – is the (optional) transform
-
inline explicit BinUtility(std::vector<float> &bValues, BinningOption opt = open, AxisDirection value = AxisDirection::AxisPhi, const Transform3 &tForm = Transform3::Identity())
Constructor for arbitrary.
- Parameters:
bValues – is the boundary values of the binning
opt – is the binning option : open, closed
value – is the axis direction : AxisX, AxisY, AxisZ, etc.
tForm – is the (optional) transform
-
inline std::size_t bin(const Vector2 &lposition, std::size_t ba = 0) const
Bin from a 2D vector (following local parameters definitions)
no optional transform applied
USE WITH CARE !!
You need to make sure that the local position is actually in the binning frame of the BinUtility
- Parameters:
lposition – is the local position to be set
ba – is the bin dimension
- Returns:
bin calculated from local
-
inline std::size_t bin(const Vector3 &position, std::size_t ba = 0) const
Bin from a 3D vector (already in binning frame)
- Parameters:
position – is the 3D position to be evaluated
ba – is the bin dimension
- Returns:
is the bin value
-
inline std::size_t bin(float value, std::size_t ba = 0) const
Bin from a scalar (following local parameters definitions)
no optional transform applied
USE WITH CARE !!
You need to make sure that the local position is actually in the binning frame of the BinUtility
- Parameters:
value – is the scalar value to be evaluated
ba – is the bin dimension
- Returns:
bin calculated from local
-
inline const std::vector<BinningData> &binningData() const
Return the binning data vector.
- Returns:
Reference to the vector of binning data
-
inline AxisDirection binningValue(std::size_t ba = 0) const
The type/value of the binning.
- Parameters:
ba – is the binaccessor
- Returns:
the binning value of the accessor entry
-
inline std::size_t bins() const
Return the total number of bins.
- Returns:
Total number of bins across all dimensions
-
inline std::size_t bins(std::size_t ba) const
Number of bins.
- Parameters:
ba – is the binaccessor
- Returns:
std::size_t is the bins of the accessor entry
-
inline std::array<std::size_t, 3> binTriple(const Vector3 &position) const
Bin-triple fast access.
calculate the bin triple with one transform
- Parameters:
position – is the 3D position to be evaluated
- Returns:
is the bin value in 3D
-
inline std::size_t dimensions() const
First bin maximal value.
- Returns:
the dimension of the binning data
-
inline bool inside(const Vector3 &position) const
Check if bin is inside from Vector2 - optional transform applied.
- Parameters:
position – is the global position to be evaluated
- Returns:
is a boolean check
-
inline std::size_t max(std::size_t ba = 0) const
First bin maximal value.
- Parameters:
ba – is the binaccessor
- Returns:
std::size_t is the maximal bin of the accessor entry
-
inline int nextDirection(const Vector3 &position, const Vector3 &direction, std::size_t ba = 0) const
Return the other direction for fast interlinking.
- Parameters:
position – is the global position for the next search
direction – is the global position for the next search
ba – is the bin accessor
- Returns:
the next bin
-
inline BinUtility &operator+=(const BinUtility &gbu)
Operator+= to make multidimensional BinUtility.
- Parameters:
gbu – is the additional BinUtility to be chosen
- Returns:
Reference to this BinUtility after addition
-
inline bool operator==(const BinUtility &other) const
Equality operator.
- Parameters:
other – The other BinUtility to compare with
- Returns:
True if the BinUtilities are equal, false otherwise
-
inline std::size_t serialize(const std::array<std::size_t, 3> &bin) const
Serialize the bin triple.
this creates a simple std::size_t from a triple object
- Parameters:
bin – is the bin to be serialized
- Returns:
Serialized bin index as a single std::size_t value
-
inline std::ostream &toStream(std::ostream &sl, const std::string &indent = "") const
Output Method for std::ostream, to be overloaded by child classes.
- Parameters:
sl – is the ostream to be dumped into
indent – the current indentation
- Returns:
the input stream
-
inline std::string toString(const std::string &indent = "") const
Output into a string.
- Parameters:
indent – the current indentation
- Returns:
a string with the stream information
-
inline const Transform3 &transform() const
Transform applied to global positions before lookup.
- Returns:
Shared pointer to transform
Friends
-
inline friend std::ostream &operator<<(std::ostream &sl, const BinUtility &bgen)
Overload of << operator for std::ostream for debug output.
-
inline BinUtility()
-
class BinnedSurfaceMaterial : public Acts::ISurfaceMaterial
It extends the ISurfaceMaterial base class and is an array pf MaterialSlab.
This is not memory optimised as every bin holds one material property object.
The split factors:
1. : oppositePre
0. : alongPre
Public Functions
-
BinnedSurfaceMaterial(const BinUtility &binUtility, MaterialSlabMatrix materialMatrix, double splitFactor = 0., MappingType mappingType = MappingType::Default)
Explicit constructor with only full MaterialSlab, for two-dimensional binning.
- Parameters:
binUtility – defines the binning structure on the surface (copied)
materialMatrix – is the matrix of material slabs as recorded (moved)
splitFactor – is the pre/post splitting directive
mappingType – is the type of surface mapping associated to the surface
-
BinnedSurfaceMaterial(const BinUtility &binUtility, MaterialSlabVector materialVector, double splitFactor = 0., MappingType mappingType = MappingType::Default)
Explicit constructor with only full MaterialSlab, for one-dimensional binning.
- Parameters:
binUtility – defines the binning structure on the surface (copied)
materialVector – is the vector of material slabs as recorded (moved)
splitFactor – is the pre/post splitting directive
mappingType – is the type of surface mapping associated to the surface
-
inline const BinUtility &binUtility() const
Return the BinUtility.
- Returns:
Reference to the bin utility used for material binning
-
inline const MaterialSlabMatrix &fullMaterial() const
Retrieve the entire material slab matrix.
- Returns:
Reference to the complete matrix of material slabs
-
virtual std::vector<AxisDirection> localAxisDirections() const final
Returns the axis directions for the local coordinate system.
- Returns:
Vector of axis directions defining the local coordinate system
-
virtual const MaterialSlab &materialSlab(const Vector2 &lp) const final
Return method for full material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
const MaterialSlab &materialSlab(const Vector2 &lp) const = 0
Return method for full material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
MaterialSlab materialSlab(const Vector2 &lp, Direction pDir, MaterialUpdateMode mode) const
Return method for fully scaled material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
virtual const MaterialSlab &materialSlab(const Vector3 &gp) const final
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&) with a prior Surface::globalToLocal() call to convert the global position.
- Parameters:
gp – is the global position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
const MaterialSlab &materialSlab(const Vector3 &gp) const = 0
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&) with a prior Surface::globalToLocal() call to convert the global position.
- Parameters:
gp – is the global position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
MaterialSlab materialSlab(const Vector3 &gp, Direction pDir, MaterialUpdateMode mode) const
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&, Direction, MaterialUpdateMode) with a prior Surface::globalToLocal() call to convert gp.
- Parameters:
gp – is the global position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
virtual BinnedSurfaceMaterial &scale(double factor) final
Scale operation.
- Parameters:
factor – is the scale factor for the full material
- Returns:
Reference to this object after scaling
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream, to be overloaded by child classes.
- Parameters:
sl – The output stream to write to
- Returns:
Reference to the output stream after writing
-
class BinningData
This class holds all the data necessary for the bin calculation.
phi has a very particular behaviour:
there’s the change around +/- PI
it can be multiplicative or additive multiplicative : each major bin has the same sub structure i.e. first binnning
structure is equidistant additive : sub structure replaces one bin (and one bin only)
Public Functions
-
BinningData() = default
-
inline BinningData(AxisDirection bValue, float bMin, float bMax)
Constructor for 0D binning.
- Parameters:
bValue – is the axis direction AxisX, AxisY, etc.
bMin – is the minimum value
bMax – is the maximum value
-
inline BinningData(BinningOption bOption, AxisDirection bValue, const std::vector<float> &bBoundaries, std::unique_ptr<const BinningData> sBinData = nullptr)
Constructor for non-equidistant binning.
- Parameters:
bOption – is the binning option : open / closed
bValue – is the axis direction : AxisX, AxisY, etc.
bBoundaries – are the bin boundaries
sBinData – is (optional) sub structure
-
inline BinningData(BinningOption bOption, AxisDirection bValue, std::size_t bBins, float bMin, float bMax, std::unique_ptr<const BinningData> sBinData = nullptr, bool sBinAdditive = false)
Constructor for equidistant binning and optional sub structure can be multiplicative or additive.
- Parameters:
bOption – is the binning option : open, closed
bValue – is the axis direction: Axis, AxisY, etc.
bBins – is number of equidistant bins
bMin – is the minimum value
bMax – is the maximum value
sBinData – is (optional) sub structure
sBinAdditive – is the prescription for the sub structure
-
inline BinningData(const BinningData &bdata)
Copy constructor.
- Parameters:
bdata – is the source object
-
inline explicit BinningData(const DirectedProtoAxis &dpAxis)
Constructor from DirectedProtoAxis.
- Parameters:
dpAxis – is the ProtoAxis object
-
~BinningData() = default
-
inline std::size_t bins() const
Return the number of bins - including sub bins.
- Returns:
Total number of bins including sub-bins
-
inline const std::vector<float> &boundaries() const
Return the boundaries - including sub boundaries.
- Returns:
vector of floats indicating the boundary values
-
inline float center(std::size_t bin) const
Get the center value of a bin.
- Parameters:
bin – is the bin for which the center value is requested
- Returns:
float value according to the bin center
-
inline float centerValue(std::size_t bin) const
access to the center value this uses the bin boundary vector, it also works with sub structure
- Parameters:
bin – is the bin for which the value is requested, if bin > nbins it is set to max
- Returns:
the center value of the bin is given
-
inline bool inside(const Vector2 &lposition) const
Check if bin is inside from Vector2.
- Parameters:
lposition – is the search position in global coordinated
- Returns:
boolean if this is inside() method is true
-
inline bool inside(const Vector3 &position) const
Check if bin is inside from Vector3.
- Parameters:
position – is the search position in global coordinated
- Returns:
boolean if this is inside() method is true
-
inline int nextDirection(const Vector3 &position, const Vector3 &dir) const
Layer next direction is needed.
- Parameters:
position – is the start search position
dir – is the direction
- Returns:
integer that indicates which direction to move
-
inline BinningData &operator=(const BinningData &bdata)
Assignment operator.
- Parameters:
bdata – is the source object
- Returns:
Reference to this BinningData after assignment
-
inline bool operator==(const BinningData &bData) const
Equality operator.
- Parameters:
bData – is the binning data to be checked against
- Returns:
a boolean indicating if they are the same
-
inline BinningData scale(float factor) const
Create a scaled version of this BinningData.
- Parameters:
factor – is the scaling factor to be applied to the binning parameters
- Returns:
a new BinningData object with scaled parameters
-
inline std::size_t search(float value) const
Generic search - forwards to correct function pointer.
- Parameters:
value – is the searchvalue as float
- Returns:
bin according tot this
-
inline std::size_t searchGlobal(const Vector3 &position) const
Generic search from a 3D position — corresponds to global coordinate schema.
- Parameters:
position – is the search position in global coordinated
- Returns:
bin according tot this
-
inline std::size_t searchLocal(const Vector2 &lposition) const
Generic search from a 2D position — corresponds to local coordinate schema.
- Parameters:
lposition – is the search position in local coordinated
- Returns:
bin according tot this
-
inline std::size_t searchWithSubStructure(float value) const
Generic search with sub structure.
forwards to correct function pointer
- Parameters:
value – is the searchvalue as float
- Returns:
bin according tot this
-
inline std::string toString(const std::string &indent = "") const
String screen output method.
- Parameters:
indent – the current indentation
- Returns:
a string containing the screen information
-
inline float value(const Vector2 &lposition) const
Take the right float value.
- Parameters:
lposition – assumes the correct local position expression
- Returns:
float value according to the binning setup
-
inline float value(const Vector3 &position) const
Take the right float value.
- Parameters:
position – is the global position
- Returns:
float value according to the binning setup
-
inline float width(std::size_t bin) const
Get the width of a bin.
- Parameters:
bin – is the bin for which the width is requested
- Returns:
float value of width
Public Members
-
AxisDirection binvalue = {}
axis direction: AxisX, AxisY, AxisZ, …
-
float max = {}
maximum value
-
float min = {}
minimum value
-
BinningOption option = {}
binning option: open, closed
-
float step = {}
binning step
-
bool subBinningAdditive = {}
sub structure: additive or multiplicative
-
std::unique_ptr<const BinningData> subBinningData
sub structure: describe some sub binning
-
BinningType type = {}
binning type: equidistant, arbitrary
-
bool zdim = {}
zero dimensional binning : direct access
-
class BoundaryTolerance
Variant-like type to capture different types of boundary tolerances.
Since our track hypothesis comes with uncertainties, we sometimes need to check if the track is not just within the boundary of the surface but also within a certain tolerance. This class captures different parameterizations of such tolerances. The surface class will then use these tolerances to check if a ray is within the boundary+tolerance of the surface.
Different types of boundary tolerances implemented:
Infinite: Infinite tolerance i.e. no boundary check will be performed.
None: No tolerance i.e. exact boundary check will be performed.
AbsoluteEuclidean: Absolute tolerance in Euclidean distance. The tolerance is defined as a single absolute value for the Euclidean distance. The Euclidean distance can be calculated via the local bound Jacobian and the bound coordinate residual. If the distance is within the tolerance, the boundary check is considered as passed.
Chi2Bound: Chi2 tolerance in bound coordinates. The tolerance is defined as a maximum chi2 value and a weight matrix, which is the inverse of the bound covariance matrix. The chi2 value is calculated from the bound coordinates residual and the weight matrix. If the chi2 value is below the maximum chi2 value, the boundary check is considered as passed.
Chi2Cartesian: Chi2 tolerance in Cartesian coordinates. Similar to Chi2Bound, but the chi2 value is calculated in Cartesian coordinates.
The bound coordinates residual is defined as the difference between the point checked and the closest point on the boundary. The Jacobian is the derivative of the bound coordinates with respect to the Cartesian coordinates.
Public Types
Public Functions
-
BoundaryTolerance(BoundaryTolerance &&other) noexcept = default
Move constructor.
- Parameters:
other – The BoundaryTolerance object to move
-
BoundaryTolerance(const BoundaryTolerance &other) noexcept = default
Copy constructor.
- Parameters:
other – The BoundaryTolerance object to copy
-
inline constexpr const AbsoluteEuclideanParams &asAbsoluteEuclidean() const
Get the tolerance as absolute Euclidean.
- Returns:
Reference to the absolute Euclidean tolerance parameters
-
inline constexpr const Chi2BoundParams &asChi2Bound() const
Get the tolerance as chi2 bound.
- Returns:
Reference to the chi2 bound tolerance parameters
-
inline constexpr const Chi2CartesianParams &asChi2Cartesian() const
Get the tolerance as chi2 Cartesian.
- Returns:
Reference to the chi2 Cartesian tolerance parameters
-
inline constexpr bool hasAbsoluteEuclidean() const
Check if the tolerance is absolute with Euclidean distance.
- Returns:
True if configured for absolute Euclidean tolerance, false otherwise
-
inline constexpr bool hasChi2Bound() const
Check if the tolerance is chi2 with bound coordinates.
- Returns:
True if configured for chi2 tolerance in bound coordinates, false otherwise
-
inline constexpr bool hasChi2Cartesian() const
Check if the tolerance is chi2 with Cartesian coordinates.
- Returns:
True if configured for chi2 tolerance in Cartesian coordinates, false otherwise
-
inline constexpr bool isInfinite() const
Check if the tolerance is infinite.
- Returns:
True if configured for infinite tolerance, false otherwise
-
inline constexpr bool isNone() const
Check if the is no tolerance.
- Returns:
True if configured for no tolerance (exact checking), false otherwise
-
bool isTolerated(const Vector2 &boundDelta, const SquareMatrix2 &boundToCartesian) const
Check if the bound position delta is tolerated.
- Parameters:
boundDelta – The delta in bound coordinates
boundToCartesian – The transformation matrix from bound to Cartesian
- Returns:
True if the delta is within tolerance, false otherwise
-
BoundaryTolerance &operator=(BoundaryTolerance &&other) noexcept = default
Move assignment operator.
- Parameters:
other – The BoundaryTolerance object to move
- Returns:
Reference to this BoundaryTolerance after moving
-
BoundaryTolerance &operator=(const BoundaryTolerance &other) noexcept = default
Copy assignment operator.
- Parameters:
other – The BoundaryTolerance object to copy
- Returns:
Reference to this BoundaryTolerance after copying
-
ToleranceMode toleranceMode() const
Get the tolerance mode.
- Returns:
ToleranceMode indicating how the tolerance should be applied
Public Static Functions
-
static inline constexpr auto AbsoluteEuclidean(double tolerance) noexcept
Absolute tolerance in Euclidean distance.
- Parameters:
tolerance – The tolerance value in Euclidean distance
- Returns:
BoundaryTolerance configured for absolute Euclidean tolerance
-
static inline auto Chi2Bound(const SquareMatrix2 &weight, double maxChi2) noexcept
Chi2 tolerance in bound coordinates.
- Parameters:
weight – The weight matrix for the chi2 calculation
maxChi2 – The maximum chi2 value allowed
- Returns:
BoundaryTolerance configured for chi2 tolerance in bound coordinates
-
static inline auto Chi2Cartesian(const SquareMatrix2 &weight, double maxChi2) noexcept
Chi2 tolerance in Cartesian coordinates.
- Parameters:
weight – The weight matrix for the chi2 calculation
maxChi2 – The maximum chi2 value allowed
- Returns:
BoundaryTolerance configured for chi2 tolerance in Cartesian coordinates
-
static inline constexpr auto Infinite() noexcept
Infinite tolerance i.e.
no boundary check
- Returns:
BoundaryTolerance configured for infinite tolerance
-
static inline constexpr auto None() noexcept
No tolerance i.e.
exact boundary check
- Returns:
BoundaryTolerance configured for no tolerance (exact checking)
-
struct AbsoluteEuclideanParams
Parameters for absolute Euclidean boundary tolerance.
Public Members
-
double tolerance = {}
Tolerance value.
-
double tolerance = {}
-
struct Chi2BoundParams
Parameters for chi2 boundary tolerance in bound coordinates.
Public Functions
-
inline Eigen::Map<SquareMatrix2> weightMatrix()
Get weight matrix as Eigen matrix.
- Returns:
Mapped weight matrix
-
inline Eigen::Map<const SquareMatrix2> weightMatrix() const
Get weight matrix as const Eigen matrix.
- Returns:
Mapped weight matrix
-
inline Eigen::Map<SquareMatrix2> weightMatrix()
-
struct Chi2CartesianParams
Parameters for chi2 boundary tolerance in Cartesian coordinates.
Public Functions
-
inline Eigen::Map<SquareMatrix2> weightMatrix()
Get weight matrix as Eigen matrix.
- Returns:
Mapped weight matrix
-
inline Eigen::Map<const SquareMatrix2> weightMatrix() const
Get weight matrix as const Eigen matrix.
- Returns:
Mapped weight matrix
-
inline Eigen::Map<SquareMatrix2> weightMatrix()
-
struct InfiniteParams
-
struct NoneParams
-
class CalibrationContext : public ContextType
This is the central definition of the Acts payload object regarding detector calibration.
It is propagated through the code to allow for event/thread dependent calibration
-
template<typename propagator_t, typename track_container_t>
class CombinatorialKalmanFilter Combinatorial Kalman filter to find tracks.
The CombinatorialKalmanFilter contains an Actor and a Sequencer sub-class. The Sequencer has to be part of the Navigator of the Propagator in order to initialize and provide the measurement surfaces.
The Actor is part of the Propagation call and does the Kalman update. Updater and Calibrator are given to the Actor for further use:
The Updater is the implemented kalman updater formalism, it runs via a visitor pattern through the measurements.
Measurements are not required to be ordered for the CombinatorialKalmanFilter, measurement ordering needs to be figured out by the navigation of the propagator.
The void components are provided mainly for unit testing.
- Template Parameters:
propagator_t – Type of the propagator
Public Functions
-
CombinatorialKalmanFilter() = delete
Default constructor is deleted.
-
inline explicit CombinatorialKalmanFilter(propagator_t pPropagator, std::unique_ptr<const Logger> _logger = getDefaultLogger("CKF", Logging::INFO))
Constructor with propagator and logging level.
- Parameters:
pPropagator – The propagator used for the track finding
_logger – The logger for messages
-
inline auto findTracks(const BoundTrackParameters &initialParameters, const CombinatorialKalmanFilterOptions<track_container_t> &tfOptions, track_container_t &trackContainer) const -> Result<std::vector<typename std::decay_t<decltype(trackContainer)>::TrackProxy>>
Combinatorial Kalman Filter implementation, calls the Kalman filter.
Note
The input measurements are given in the form of
SourceLinks. It’scalibrator_t'sjob to turn them into calibrated measurements used in the track finding.- Parameters:
initialParameters – The initial track parameters
tfOptions – CombinatorialKalmanFilterOptions steering the track finding
trackContainer – Track container in which to store the results
- Returns:
a container of track finding result for all the initial track parameters
-
inline auto findTracks(const BoundTrackParameters &initialParameters, const CombinatorialKalmanFilterOptions<track_container_t> &tfOptions, track_container_t &trackContainer, typename track_container_t::TrackProxy rootBranch) const -> Result<std::vector<typename std::decay_t<decltype(trackContainer)>::TrackProxy>>
Combinatorial Kalman Filter implementation, calls the Kalman filter.
Note
The input measurements are given in the form of
SourceLinks. It’scalibrator_t'sjob to turn them into calibrated measurements used in the track finding.- Parameters:
initialParameters – The initial track parameters
tfOptions – CombinatorialKalmanFilterOptions steering the track finding
trackContainer – Track container in which to store the results
rootBranch – The track to be used as the root branch
- Returns:
a container of track finding result for all the initial track parameters
-
class ConeBounds : public Acts::SurfaceBounds
Bounds for a conical surface, the opening angle is stored in \( \tan(\alpha) \) and always positively defined.
The cone can open to both sides, steered by \( z_min \) and \( z_max \).
Public Types
Public Functions
-
explicit ConeBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from parameters array.
- Parameters:
values – The parameter array
-
ConeBounds(double alpha, bool symm, double halfphi = std::numbers::pi, double avphi = 0.) noexcept(false)
Constructor - open cone with alpha, by default a full cone but optionally can make a conical section.
- Parameters:
alpha – is the opening angle of the cone
symm – is the boolean indicating if the cone is symmetric in +/- z
halfphi – is the half opening angle (default is pi)
avphi – is the phi value around which the bounds are opened (default=0)
-
ConeBounds(double alpha, double minz, double maxz, double halfphi = std::numbers::pi, double avphi = 0.) noexcept(false)
Constructor - open cone with alpha, minz and maxz, by default a full cone but can optionally make it a conical section.
- Parameters:
alpha – is the opening angle of the cone
minz – cone expanding from minimal z
maxz – cone expanding to maximal z
halfphi – is the half opening angle (default is pi)
avphi – is the phi value around which the bounds are opened (default=0)
-
inline virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
inline virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For ConeBounds: returns (averagePhi, (minZ + maxZ)/2) in cone coordinates
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
Value of the specified bound parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
inline double r(double z) const
Return the radius at a specific z values.
- Parameters:
z – is the z value for which r is requested
- Returns:
is the r value associated with z
-
inline double tanAlpha() const
Return tangent of alpha (pre-computed)
- Returns:
Tangent of the cone half-angle
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – is the ostrea into which the dump is done
- Returns:
is the input object
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Access method for bound values, this is a dynamically sized vector containing the parameters needed to describe these bounds.
- Returns:
of the stored values for this SurfaceBounds object
-
explicit ConeBounds(const std::array<double, eSize> &values) noexcept(false)
-
class ConeLayer : public virtual Acts::ConeSurface, public Acts::Layer
Class to describe a conical detector layer for tracking, it inherits from both, Layer base class and ConeSurface class.
Public Functions
-
ConeLayer() = delete
-
~ConeLayer() override = default
-
virtual const ConeSurface &surfaceRepresentation() const override
Transforms the layer into a Surface representation for extrapolation.
- Returns:
Const reference to the cone surface representing this layer
-
virtual ConeSurface &surfaceRepresentation() override
Non-const version of surface representation access.
- Returns:
Mutable reference to the cone surface
Public Static Functions
Factory for shared layer.
- Parameters:
transform – is the 3D transform that positions the layer in 3D frame
cbounds – is the conical bound description
surfaceArray – is the array of sensitive surfaces
thickness – is the layer thickness along the normal axis
ad – is the approach descriptor for navigation towards the layer
laytyp – is the layer type
- Returns:
is a shared pointer to a layer
-
ConeLayer() = delete
-
class ConeSurface : public Acts::RegularSurface
Class for a conical surface in the Tracking geometry.
It inherits from Surface.
The ConeSurface is special since no corresponding Track parameters exist since they’re numerical instable at the tip of the cone. Propagations to a cone surface will be returned in curvilinear coordinates.
Subclassed by Acts::ConeLayer
Public Functions
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the derivative of path length at the geometry constraint or point-of-closest-approach w.r.t.
alignment parameters of the surface (i.e. local frame origin in global 3D Cartesian coordinates and its rotation represented with extrinsic Euler angles)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Derivative of path length w.r.t. the alignment parameters
Overwrite the existing surface bounds with new ones.
- Parameters:
newBounds – Pointer to the new bounds
-
virtual const ConeBounds &bounds() const final
This method returns the ConeBounds by reference.
- Returns:
Reference to the cone bounds
-
const std::shared_ptr<const ConeBounds> &boundsPtr() const
This method returns the shared_ptr to the ConeBounds.
- Returns:
Shared pointer to the cone bounds
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
Convert a global position to a local one this is the most generic interface, which is implemented by all surfaces.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
direction – is the direction of the local position (ignored for
RegularSurface)tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const final
Global to local transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be transformed
tolerance – optional tolerance within which a point is considered valid on surface
- Returns:
a Result<Vector2> which can be !ok() if the operation fails
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const = 0
Convert a global position to a local one.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual MultiIntersection3D intersect(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::Infinite(), double tolerance = s_onSurfaceTolerance) const final
Straight line intersection schema from position/direction.
If possible returns both solutions for the cylinder
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position to start from
direction – The direction at start
boundaryTolerance – the Boundary Check
tolerance – the tolerance used for the intersection
- Returns:
MultiIntersection3Dobject (contains intersection & surface)
-
virtual Matrix<2, 3> localCartesianToBoundLocalDerivative(const GeometryContext &gctx, const Vector3 &position) const final
Calculate the derivative of bound track parameters local position w.r.t.
position in local 3D Cartesian coordinates
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position of the parameters in global
- Returns:
Derivative of bound local position w.r.t. position in local 3D cartesian coordinates
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const final
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position to be transformed
- Returns:
The global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
The global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const final
Local to global transformation.
This is the most generic interface, which is implemented by all surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
direction – global 3D momentum direction (ignored for
RegularSurface)
- Returns:
The global position by value
-
virtual std::string name() const override
Return properly formatted class name for screen output.
- Returns:
String representation of the class name
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const final
Return method for surface normal information.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position at normal vector request
- Returns:
Vector3 normal vector in global frame
-
Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Calculate the normal vector of the surface This overload requires an on-surface local position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position where the normal vector is constructed
- Returns:
normal vector by value
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const final
Calculate the normal vector of the surface This overload is fully generic, fulfills the Surface interface and accepts a global position and a direction.
For
RegularSurfacethis is equivalent to the normal overload, ignoring thedirection- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – is the global position where the normal vector is constructed
direction – is the direction of the normal vector (ignored for
RegularSurface)
- Returns:
Normal vector at the given position
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const final
Return method for surface normal information.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position as normal vector base
- Returns:
Vector3 normal vector in global frame
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const = 0
Calculate the normal vector of the surface This overload accepts a global position.
- Parameters:
position – is the global position where the normal vector is constructed
gctx – The current geometry context object, e.g. alignment
- Returns:
normal vector by value
-
ConeSurface &operator=(const ConeSurface &other)
Assignment operator.
- Parameters:
other – is the source surface for the assignment
- Returns:
Reference to this ConeSurface after assignment
-
virtual double pathCorrection(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
The pathCorrection for derived classes with thickness.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global potion at the correction point
direction – is the momentum direction at the correction point
- Returns:
is the path correction due to incident angle
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int quarterSegments = 2u) const override
Return a Polyhedron for the surfaces.
Note
The phi extrema points at (-pi, -1/2 pi, 0, 1/2 pi) that fall within the surface will be inserted to guarantee an appropriate extent measurement in x and y
- Parameters:
gctx – The current geometry context object, e.g. alignment
quarterSegments – Number of segments used to approximate a quarter
- Returns:
A list of vertices and a face/facett description of it
-
virtual RotationMatrix3 referenceFrame(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Return the measurement frame - this is needed for alignment, in particular for StraightLine and Perigee Surface.
the default implementation is the RotationMatrix3 of the transform
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position where the measurement frame is constructed
direction – is the momentum direction used for the measurement frame construction
- Returns:
matrix that indicates the measurement frame
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const final
The binning position method - is overloaded for r-type binning.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – defines the direction of binning applied in the global frame
- Returns:
The return type is a vector for positioning in the global frame
-
virtual Vector3 rotSymmetryAxis(const GeometryContext &gctx) const
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
The local z axis vector
-
virtual SurfaceType type() const override
Return the surface type.
- Returns:
Surface type identifier
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
-
class ConeVolumeBounds : public Acts::VolumeBounds
Volume bound class for describing conical volumes either with cylindrical inlay or outer boundary, it also allows for a sectoral description.
Public Types
Public Functions
-
ConeVolumeBounds() = delete
-
ConeVolumeBounds(const ConeVolumeBounds &cobo) = default
Copy constructor.
- Parameters:
cobo – Cone volume bounds to copy
-
inline explicit ConeVolumeBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from a fixed size array.
- Parameters:
values – The bound values
-
ConeVolumeBounds(double cylinderR, double alpha, double offsetZ, double halflengthZ, double averagePhi, double halfPhiSector) noexcept(false)
Constructor - for general cylidner-cone setups.
Note
depending on cylinderR > coneR it is constructing a cone with cylindrical cutout or a cylinder with conical cutout
- Parameters:
cylinderR – The inner radius of the cylinder
alpha – The opening angle of the cone (0 if no cone)
offsetZ – The tip z position in of the cone, w.r.t center
halflengthZ – The minimum z value of the inner and outer cones
averagePhi – The phi orientation of the sector (defaulted to 0)
halfPhiSector – The opening angle phi sector
-
ConeVolumeBounds(double innerAlpha, double innerOffsetZ, double outerAlpha, double outerOffsetZ, double halflengthZ, double averagePhi, double halfPhiSector) noexcept(false)
Constructor - for general cone-cone setups.
- Parameters:
innerAlpha – The opening angle of the inner cone (0 if no cone)
innerOffsetZ – The tip z position in of the inner cone, w.r.t center
outerAlpha – The opening angle of the outer cone (0 if no cone)
outerOffsetZ – The tip z position in of the outer cone, w.r.t center
halflengthZ – The minimum z value of the inner and outer cones
averagePhi – The phi orientation of the sector
halfPhiSector – The opening angle phi sector
-
~ConeVolumeBounds() override = default
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
Value of the specified bound parameter
-
double innerRmax() const
Return the derived inner maximum radius.
- Returns:
Inner maximum radius at the largest z position
-
double innerRmin() const
Return the derived inner minimum radius.
- Returns:
Inner minimum radius at the smallest z position
-
double innerTanAlpha() const
Return the derived inner tangent of the cone opening angle.
- Returns:
Tangent of the inner cone opening angle
-
virtual bool inside(const Vector3 &pos, double tol = 0.) const final
This method checks if position in the 3D volume frame is inside the cylinder.
- Parameters:
pos – is the position in volume frame to be checked
tol – is the absolute tolerance to be applied
- Returns:
True if the position is inside the cone volume bounds
-
ConeVolumeBounds &operator=(const ConeVolumeBounds &cobo) = default
Assignment operator.
- Parameters:
cobo – Cone volume bounds to assign
- Returns:
Reference to this object
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const final
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
double outerRmax() const
Return the derived outer maximum radius.
- Returns:
Outer maximum radius at the largest z position
-
double outerRmin() const
Return the derived outer minimum radius.
- Returns:
Outer minimum radius at the smallest z position
-
double outerTanAlpha() const
Return the derived outer tangent of the cone opening angle.
- Returns:
Tangent of the outer cone opening angle
-
virtual std::ostream &toStream(std::ostream &os) const final
Output Method for std::ostream.
- Parameters:
os – is ostream operator to be dumped into
- Returns:
Reference to the output stream after writing
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
ConeVolumeBounds() = delete
-
class ConstantBField : public Acts::MagneticFieldProvider
The simplest magnetic field implementation is a constant field, which returns the same field values at every queried location.
Public Functions
-
inline explicit ConstantBField(Vector3 B)
Construct constant magnetic field from field vector.
- Parameters:
B – [in] magnetic field vector in global coordinate system
-
inline Vector3 getField() const
Get the B field at a position.
- Returns:
The constant magnetic field vector
-
inline virtual Result<Vector3> getField(const Vector3 &position, MagneticFieldProvider::Cache &cache) const override
Retrieve magnetic field value at a given location.
Requires an instance of Acts::MagneticFieldProvider::Cache created through makeCache.
Note
The
positionis ignored and only kept as argument to provide a consistent interface with other magnetic field services.- Parameters:
position – [in] global 3D position for the lookup
cache – [inout] Field provider specific cache object
- Returns:
magnetic field vector at given position
-
inline bool isInside(const Vector3&) const
check whether given 3D position is inside look-up domain
- Returns:
Always true for constant magnetic field
-
inline virtual Acts::MagneticFieldProvider::Cache makeCache(const Acts::MagneticFieldContext &mctx) const override
Make an opaque cache for the magnetic field.
Instructs the specific implementation to generate a Acts::MagneticFieldProvider::Cache instance for magnetic field lookup.
- Parameters:
mctx – The magnetic field context to generate cache for
- Returns:
Cache The opaque cache object
-
struct Cache
Cache object for constant magnetic field.
Public Functions
-
inline explicit Cache(const MagneticFieldContext&)
Constructor with context.
Note
For the constant field, the cache is empty.
-
inline explicit Cache(const MagneticFieldContext&)
-
inline explicit ConstantBField(Vector3 B)
-
class ConstrainedStep
A constrained step class for the steppers.
This class is symmetrical for forward and backward propagation. The sign of the propagation direction should not enter here but rather be applied the step is actually taken.
As simple as this class looks it hides a few very important details:
Overstepping handling. The step size sign will flip if we happened to pass our target.
Convergence handling. Smaller and smaller step sizes have to be used in order to converge on a target.
Because of the points mentioned above, the update function will always prefer negative step sizes. A side effect of this is that we will propagate in the opposite direction if the target is “behind us”.
The hierarchy is:
Overstepping resolution / backpropagation
Convergence
Step into the void with
std::numeric_limits<double>max()
Public Types
Public Functions
-
constexpr ConstrainedStep() = default
-
inline explicit constexpr ConstrainedStep(double v)
constructor
- Parameters:
v – is the user given initial value
-
inline constexpr double accuracy() const
Access the accuracy value.
- Returns:
The step size accuracy constraint
-
inline constexpr void release(Type type)
release a certain constraint value
- Parameters:
type – is the constraint type to be released
-
inline constexpr void releaseAccuracy()
release accuracy
-
inline constexpr void setAccuracy(double v)
set accuracy
this will set only the accuracy, as this is the most exposed to the Propagator
- Parameters:
v – is the new accuracy value
-
inline constexpr void setUser(double v)
set user
- Parameters:
v – is the new user value
-
inline std::ostream &toStream(std::ostream &os) const
Stream the constrained step into an output stream.
- Parameters:
os – Output stream to write to
- Returns:
Reference to the output stream for chaining
-
inline std::string toString() const
Convert the constrained step to a string representation.
- Returns:
String representation of the constrained step
-
inline constexpr void update(double v, Type type)
Update the step size of a certain type.
Only navigation and target abortion step size updates may change the sign due to overstepping
- Parameters:
v – is the new value to be updated
type – is the constraint type
-
inline constexpr double value() const
returns the min step size
- Returns:
The minimum constrained step size considering all constraints
-
template<int N>
class ConvexPolygonBounds : public Acts::ConvexPolygonBoundsBase This is the actual implementation of the bounds.
It is templated on the number of vertices, but there is a specialization for dynamic number of vertices, where the underlying storage is then a vector.
- Template Parameters:
N – Number of vertices
Public Functions
-
explicit ConvexPolygonBounds(std::span<const double> values) noexcept(false)
Constructor from a fixed size array of parameters This will throw if the vertices do not form a convex polygon.
- Parameters:
values – The values to build up the vertices
-
explicit ConvexPolygonBounds(std::span<const Vector2> vertices) noexcept(false)
Constructor from a vector of vertices, to facilitate construction.
This will throw if the vector size does not match
num_vertices. This will throw if the vertices do not form a convex polygon.- Parameters:
vertices – The list of vertices.
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
virtual std::vector<Vector2> vertices(unsigned int ignoredSegments = 0u) const final
Return the vertices.
Note
the number of segments is ignored in this representation
- Parameters:
ignoredSegments – the number of segments used to approximate and eventually curved line
- Returns:
vector for vertices in 2D
-
class ConvexPolygonBoundsBase : public Acts::PlanarBounds
base class for convex polygon bounds
This class serves as a base class for the actual bounds class. The only deriving type is the templated
ConvexPolygonBounds.Subclassed by Acts::ConvexPolygonBounds< N >, Acts::ConvexPolygonBounds< PolygonDynamic >
Public Functions
-
virtual const RectangleBounds &boundingBox() const final
Return a rectangle bounds object that encloses this polygon.
- Returns:
The rectangular bounds
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For ConvexPolygonBounds: returns average of all vertices (vertex centroid)
- Returns:
Vector2 representing the center position in local coordinates
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – is the ostream to be written into
- Returns:
Reference to the output stream after writing
-
inline virtual BoundsType type() const final
Return the bounds type of this bounds object.
- Returns:
The bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
virtual const RectangleBounds &boundingBox() const final
-
class CuboidVolumeBounds : public Acts::VolumeBounds
Bounds for a cubical Volume, the orientedSurfaces(…) method creates a vector of 6 surfaces:
BoundarySurfaceFace [index]:
negativeFaceXY [0] : Rectangular Acts::PlaneSurface, parallel to \( xy \) plane at negative \( z \)
positiveFaceXY [1] : Rectangular Acts::PlaneSurface, parallel to \( xy \) plane at positive \( z \)
negativeFaceXY [2] : Rectangular Acts::PlaneSurface, attached to \( yz \) plane at negative \( x \)
positiveFaceXY [3] : Rectangular Acts::PlaneSurface, attached to \( yz \) plane at negative \( x \)
negativeFaceXY [4] : Rectangular Acts::PlaneSurface, parallel to \( zx \) plane at negative \( y \)
positiveFaceXY [5] : Rectangular Acts::PlaneSurface, parallel to \( zx \) plane at positive \( y \)
Public Types
-
enum BoundValues
for streaming and access
Values:
-
enumerator eHalfLengthX
-
enumerator eHalfLengthY
-
enumerator eHalfLengthZ
-
enumerator eSize
-
enumerator eHalfLengthX
-
enum class Face : unsigned int
Enum describing the possible faces of a cuboid volume.
Note
These values are synchronized with the BoundarySurfaceFace enum. Once Gen1 is removed, this can be changed.
Values:
-
enumerator NegativeZFace
-
enumerator PositiveZFace
-
enumerator NegativeXFace
-
enumerator PositiveXFace
-
enumerator NegativeYFace
-
enumerator PositiveYFace
-
enumerator NegativeZFace
Public Functions
-
CuboidVolumeBounds() = delete
-
CuboidVolumeBounds(const CuboidVolumeBounds &bobo) = default
Copy Constructor.
- Parameters:
bobo – is the source volume bounds to be copied
-
explicit CuboidVolumeBounds(const std::array<double, eSize> &values)
Constructor - from a fixed size array.
- Parameters:
values – iw the bound values
-
CuboidVolumeBounds(double halex, double haley, double halez) noexcept(false)
Constructor - the box boundaries.
- Parameters:
halex – is the half length of the cube in x
haley – is the half length of the cube in y
halez – is the half length of the cube in z
-
CuboidVolumeBounds(std::initializer_list<std::pair<BoundValues, double>> keyValues)
Constructor with initializer list of key-value pairs.
- Parameters:
keyValues – List of bound value identifiers and their corresponding values
-
~CuboidVolumeBounds() override = default
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline virtual std::vector<AxisDirection> canonicalAxes() const override
Get the canonical binning direction, i.e.
the binning directions for that fully describe the shape’s extent
- Returns:
vector of canonical binning values
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The requested bound value
-
virtual bool inside(const Vector3 &pos, double tol = 0.) const override
This method checks if position in the 3D volume frame is inside the cylinder.
- Parameters:
pos – is the position in volume frame to be checked
tol – is the absolute tolerance to be applied
- Returns:
True if the position is inside the cuboid bounds
-
CuboidVolumeBounds &operator=(const CuboidVolumeBounds &bobo) = default
Assignment operator.
- Parameters:
bobo – is the source volume bounds to be assigned
- Returns:
Reference to this object after assignment
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const override
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
virtual double referenceBorder(AxisDirection aDir) const final
Binning borders in double.
- Parameters:
aDir – is the axis direction for which the reference border is requested
- Returns:
float offset to be used for the binning
-
void set(BoundValues bValue, double value)
Set a bound value.
- Parameters:
bValue – the bound value identifier
value – the value to be set
-
void set(std::initializer_list<std::pair<BoundValues, double>> keyValues)
Set a range of bound values.
- Parameters:
keyValues – the initializer list of key value pairs
-
virtual std::ostream &toStream(std::ostream &os) const override
Output Method for std::ostream.
- Parameters:
os – is ostream operator to be dumped into
- Returns:
Reference to the output stream after writing
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
Public Static Functions
-
static BoundValues boundsFromAxisDirection(AxisDirection direction)
Convert axis direction to a corresponding bound value in local coordinate convention.
- Parameters:
direction – the axis direction to convert
- Returns:
The bound value corresponding to the axis direction
-
static std::tuple<Face, Face, std::array<Face, 4>> facesFromAxisDirection(AxisDirection direction)
Convert axis direction to a set of corresponding cuboid faces in local coordinate convention.
- Parameters:
direction – the axis direction to convert
- Returns:
A tuple of cuboid faces with the following ordering convention: (1) negative face orthogonal to the axis direction (2) positive face orthogonal to the axis direction (3) list of side faces parallel to the axis direction
-
class CuboidVolumeStack : public Acts::VolumeStack
This class implements a x-.
y-. z-aligned stack of cuboid volumes with synchronized bounds. Externally, it presents as a single volume. On construction, the input volumes are modified so that they are connected in x, y, z and have synchronized bounds. The way this is done can be configured using an attachment and a resize strategy. Depending on the configuration, the input volumes are either extended or gap volumes are created.
Note
The size adjustment convention is that volumes are never shrunk
Public Functions
-
CuboidVolumeStack(const GeometryContext &gctx, std::vector<Volume*> &volumes, AxisDirection direction, VolumeAttachmentStrategy strategy = VolumeAttachmentStrategy::Midpoint, VolumeResizeStrategy resizeStrategy = VolumeResizeStrategy::Expand, const Logger &logger = Acts::getDummyLogger())
Constructor from a vector of volumes and direction.
Note
resizeStrategyonly affects resizing alongdirection. Resizing in the other direction is always delegated to the child volumes, which might in turn beCuboidVolumeStackNote
Preconditions are checked on construction
- Parameters:
gctx – The current geometry context object, e.g. alignment
volumes – is the vector of volumes
direction – is the axis direction
strategy – is the attachment strategy
resizeStrategy – is the resize strategy
logger – is the logger
- Pre:
The volumes need to have a common coordinate system relative to
direction. I.e. they need to be aligned inzand cannot have a rotation inxory.- Pre:
The volumes all need to have
CuboidVolumeBounds
Update the volume bounds and transform.
This will update the bounds of all volumes in the stack to accommodate the new bounds and optionally create gap volumes according to the resize strategy set during construction.
- Parameters:
gctx – The current geometry context object, e.g. alignment
volbounds – is the new bounds
transform – is the new transform
logger – is the logger
- Pre:
The volume bounds need to be of type
CuboidVolumeBounds.
Public Static Functions
-
static std::size_t axisToIndex(AxisDirection direction)
Convert axis direction to an array index according to stack convention.
For example, AxisX –> 0
- Parameters:
direction – is the axis direction to convert
- Returns:
Array index corresponding to the axis direction
-
static std::pair<AxisDirection, AxisDirection> getOrthogonalAxes(AxisDirection direction)
Get axis directions orthogonal to the given one according to stack convention.
For example AxisX –> <AxisY, AxisZ>
- Parameters:
direction – is the axis direction to find the orthogonal for
- Returns:
Pair of orthogonal axis directions
-
CuboidVolumeStack(const GeometryContext &gctx, std::vector<Volume*> &volumes, AxisDirection direction, VolumeAttachmentStrategy strategy = VolumeAttachmentStrategy::Midpoint, VolumeResizeStrategy resizeStrategy = VolumeResizeStrategy::Expand, const Logger &logger = Acts::getDummyLogger())
-
class CutoutCylinderVolumeBounds : public Acts::VolumeBounds
Class which implements a cutout cylinder.
This shape is basically a cylinder, with another, smaller cylinder subtracted from the center. ——————— rmax | | | |———| | rmed | | | | —— —— rmin — hlZc — ——— hlZ —-—
Public Types
Public Functions
-
inline explicit CutoutCylinderVolumeBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from a fixed size array.
- Parameters:
values – The bound values
-
inline CutoutCylinderVolumeBounds(double rmin, double rmed, double rmax, double hlZ, double hlZc) noexcept(false)
Constructor from defining parameters.
- Parameters:
rmin – Minimum radius at the “choke points”
rmed – The medium radius (outer radius of the cutout)
rmax – The outer radius of the overall shape
hlZ – The longer halflength of the shape
hlZc – The cutout halflength of the shape
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline virtual std::vector<AxisDirection> canonicalAxes() const override
Get the canonical binning direction, i.e.
the axis values that fully describe the shape’s extent
- Returns:
vector of canonical binning values
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
Value of the specified bound parameter
-
virtual bool inside(const Vector3 &gpos, double tol = 0) const override
Inside method to test whether a point is inside the shape.
- Parameters:
gpos – The point to test
tol – The tolerance to test with
- Returns:
Whether the point is inside or not.
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const override
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
virtual std::ostream &toStream(std::ostream &sl) const override
Write information about this instance to an outstream.
- Parameters:
sl – The outstream
- Returns:
The outstream
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
inline explicit CutoutCylinderVolumeBounds(const std::array<double, eSize> &values) noexcept(false)
-
class CylinderBounds : public Acts::SurfaceBounds
Bounds for a cylindrical Surface.
These bounds may be used for a CylinderSurface In case of bounds for a StraightLineSurface the radius determines the radius within a localPosition is regarded as inside bounds.
CylinderBounds also enhance the possibility of a cylinder segment with an opening angle \( 2\cdot\phi_{half}\) around an average \( \phi \) angle \( \phi_{ave} \).
CylinderBounds also supports beveled sides defined by an angle. Different angles can be defined on both sides of the cylinder. A positive angle is defined as “extruding” from the defined Zlength, while a negative angle is “intruding” on the Zlength.
- - +
\ | / \ | / \ | / \ | / |/______________|/ 2 * ZhalfLength
Public Types
Public Functions
-
inline explicit CylinderBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor from array.
- Parameters:
values – The bound values stored in an array
-
inline CylinderBounds(double r, double halfZ, double halfPhi = std::numbers::pi, double avgPhi = 0., double bevelMinZ = 0., double bevelMaxZ = 0.) noexcept(false)
Constructor - full cylinder.
- Parameters:
r – The radius of the cylinder
halfZ – The half length in z
halfPhi – The half opening angle
avgPhi – (optional) The phi value from which the opening angle spans
bevelMinZ – (optional) The bevel on the negative z side
bevelMaxZ – (optional) The bevel on the positive z side
-
inline virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
inline virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For CylinderBounds: returns (averagePhi, 0) in local (rphi, z) coordinates
- Returns:
Vector2 representing the center position in local coordinates
-
std::vector<Vector3> circleVertices(const Transform3 transform, unsigned int quarterSegments) const
Create the bow/circle vertices on either side of the cylinder.
- Parameters:
transform – is the global transform
quarterSegments – is the number of segments to approximate a quarter of a circle. In order to symmetrize fully closed and sectoral cylinders, also in the first case the two end points are given (albeit they overlap) in -pi / pi
- Returns:
a singlevector containing the vertices from one side and then from the other side consecutively
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline bool coversFullAzimuth() const
Returns true for full phi coverage.
- Returns:
True if the cylinder covers full azimuthal range
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
Value of the specified bound parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – The output stream to write to
- Returns:
Reference to the output stream after writing
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
class CylinderLayer : public Acts::CylinderSurface, public Acts::Layer
Class to describe a cylindrical detector layer for tracking, it inherits from both, Layer base class and CylinderSurface class.
Public Functions
-
CylinderLayer() = delete
-
CylinderLayer(const CylinderLayer &cla) = delete
-
~CylinderLayer() override = default
-
CylinderLayer &operator=(const CylinderLayer&) = delete
-
virtual const CylinderSurface &surfaceRepresentation() const override
Transforms the layer into a Surface representation This is for positioning and extrapolation.
- Returns:
Const reference to the cylinder surface representing this layer
-
virtual CylinderSurface &surfaceRepresentation() override
Non-const version of surface representation access.
- Returns:
Mutable reference to the cylinder surface
Public Static Functions
Factory for shared Layer pointer create a shared, fully deployed CylinderLayer.
- Parameters:
transform – is the 3D transform that places the layer in 3D space
cbounds – are the cylindrical bounds of the layer
surfaceArray – is the Binned Array that holds the sensitive surfaces
thickness – is the layer thickness (along the normal)
ad – is the approach descriptor for approaching the layer
laytyp – is the layer type
- Returns:
The return object is a shared pointer to the layer.
-
CylinderLayer() = delete
-
class CylinderSurface : public Acts::RegularSurface
Class for a CylinderSurface in the TrackingGeometry.
It inherits from Surface.
The cylinder surface has a special role in the TrackingGeometry, since it builds the surfaces of all TrackingVolumes at container level for a cylindrical tracking geometry.
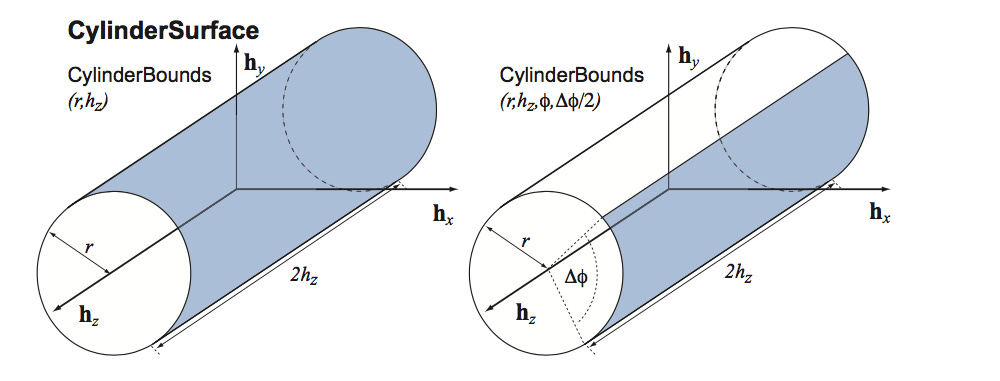
Subclassed by Acts::CylinderLayer
Public Functions
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the derivative of path length at the geometry constraint or point-of-closest-approach w.r.t.
alignment parameters of the surface (i.e. local frame origin in global 3D Cartesian coordinates and its rotation represented with extrinsic Euler angles)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Derivative of path length w.r.t. the alignment parameters
Overwrite the existing surface bounds with new ones.
- Parameters:
newBounds – Pointer to the new bounds
Assign the surface material description.
The material is usually derived in a complicated way and loaded from a framework given source. As various surfaces may share the same source this is provided by a shared pointer
- Parameters:
material – Material description associated to this surface
-
virtual const CylinderBounds &bounds() const final
This method returns the CylinderBounds by reference.
- Returns:
Reference to the cylinder bounds
-
const std::shared_ptr<const CylinderBounds> &boundsPtr() const
This method returns the shared_ptr to the CylinderBounds.
- Returns:
Shared pointer to the cylinder bounds
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
Convert a global position to a local one this is the most generic interface, which is implemented by all surfaces.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
direction – is the direction of the local position (ignored for
RegularSurface)tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const final
Global to local transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be transformed
tolerance – optional tolerance within which a point is considered valid on surface
- Returns:
a Result<Vector2> which can be !ok() if the operation fails
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const = 0
Convert a global position to a local one.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual MultiIntersection3D intersect(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::Infinite(), double tolerance = s_onSurfaceTolerance) const final
Straight line intersection schema from position/direction.
If possible returns both solutions for the cylinder
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position to start from
direction – The direction at start
boundaryTolerance – the Boundary Check Tolerance
tolerance – the tolerance used for the intersection
- Returns:
SurfaceIntersection object (contains intersection & surface)
-
virtual Matrix<2, 3> localCartesianToBoundLocalDerivative(const GeometryContext &gctx, const Vector3 &position) const final
Calculate the derivative of bound track parameters local position w.r.t.
position in local 3D Cartesian coordinates
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position of the parameters in global
- Returns:
Derivative of bound local position w.r.t. position in local 3D cartesian coordinates
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const final
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position to be transformed
- Returns:
The global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
The global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const final
Local to global transformation.
This is the most generic interface, which is implemented by all surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
direction – global 3D momentum direction (ignored for
RegularSurface)
- Returns:
The global position by value
-
std::pair<std::shared_ptr<CylinderSurface>, bool> mergedWith(const CylinderSurface &other, AxisDirection direction, bool externalRotation, const Logger &logger = getDummyLogger()) const
Merge two cylinder surfaces into a single one.

Note
The surfaces need to be compatible, i.e. have cylinder bounds that align, and have the same radius
Note
The returned boolean is
falseifthisis left or counter-clockwise ofother, andtrueif not.- Parameters:
other – The other cylinder surface to merge with
direction – The axis direction: either
AxisZorAxisRPhiexternalRotation – If true, any phi rotation is done in the transform
logger – The logger to use
- Returns:
The merged cylinder surface and a boolean indicating if surfaces are reversed
-
virtual std::string name() const override
Return method for properly formatted output string.
- Returns:
String representation of the class name
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const final
Return method for surface normal information.
Note
for a Cylinder a local position is always required for the normal vector
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position for which the normal vector is requested
- Returns:
normal vector at the local position by value
-
Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Calculate the normal vector of the surface This overload requires an on-surface local position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position where the normal vector is constructed
- Returns:
normal vector by value
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const final
Calculate the normal vector of the surface This overload is fully generic, fulfills the Surface interface and accepts a global position and a direction.
For
RegularSurfacethis is equivalent to the normal overload, ignoring thedirection- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – is the global position where the normal vector is constructed
direction – is the direction of the normal vector (ignored for
RegularSurface)
- Returns:
Normal vector at the given position
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const final
Return method for surface normal information.
Note
for a Cylinder a local position is always required for the normal vector
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position for which the normal vector is requested
- Returns:
normal vector at the global position by value
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const = 0
Calculate the normal vector of the surface This overload accepts a global position.
- Parameters:
position – is the global position where the normal vector is constructed
gctx – The current geometry context object, e.g. alignment
- Returns:
normal vector by value
-
CylinderSurface &operator=(const CylinderSurface &other)
Assignment operator.
- Parameters:
other – is the source cylinder for the copy
- Returns:
Reference to this CylinderSurface after assignment
-
virtual double pathCorrection(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Path correction due to incident of the track.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position as a starting point
direction – is the global momentum direction at the starting point
- Returns:
is the correction factor due to incident
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int quarterSegments = 2u) const override
Return a Polyhedron for a cylinder.
This method represents the cylinder as a polyhedron with a given number of segments to represent a quarter of a full circle. The polyedron will consist of the vertices of the cylinder on both sides, and faces between them, both as rectangular faces and as triangular faces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
quarterSegments – The number of segments to approximate a quarter of the full circle; it’s chosen to be 1, only the extrema points (-pi, -0.5pi, 0., 0.5pi) are inserted to capture the correct extent in the x-y plane
- Returns:
A list of vertices and a face/facett description of it
-
virtual RotationMatrix3 referenceFrame(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Return the measurement frame - this is needed for alignment, in particular The measurement frame of a cylinder is the tangential plane at a given position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the position where the measurement frame is defined
direction – is the momentum direction vector (ignored)
- Returns:
rotation matrix that defines the measurement frame
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const final
The binning position method - is overloaded for r-type binning.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the axis Direction of global binning to be done
- Returns:
is the global position to be used for binning
-
virtual Vector3 rotSymmetryAxis(const GeometryContext &gctx) const
Return method for the rotational symmetry axis.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
the z-Axis of transform
-
virtual SurfaceType type() const override
Return the surface type.
- Returns:
Surface type identifier
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
-
class CylinderVolumeBounds : public Acts::VolumeBounds
[0] and [1] at positive \( \phi \)
Bounds for a cylindrical Volume, the orientedSurfaces(..) method creates a vector of up to 6 surfaces:
case A) 3 Surfaces (full cylindrical tube): BoundarySurfaceFace [index]:
negativeFaceXY [0] : Acts::DiscSurface with \( r_{inner}=0 \), parallel to \( xy \) plane at negative \( z\)
positiveFaceXY [1] : Acts::DiscSurface with \( r_{inner}=0 \), parallel to \( xy \) plane at positive \( z\)
cylinderCover [2] : Acts::CylinderSurface confining the Acts::Volume
case B) 4 Surfaces (tube with inner and outer radius): BoundarySurfaceFace [index]:
negativeFaceXY [0] : Acts::DiscSurface with \( r_{inner}>0 \), parallel to \( xy \) plane at negative \( z\)
positiveFaceXY [1] : Acts::DiscSurface with \( r_{inner}>0 \), parallel to \( xy \) plane at positive \( z\)
tubeOuterCover [2] : Acts::CylinderSurface with \( r = r_{outer} \)
tubeInnerCover [3] : Acts::CylinderSurface with \( r = r_{inner} \)
case C) 6 Surfaces (sectoral tube with inner and outer radius): BoundarySurfaceFace [index]:
negativeFaceXY [0] : Acts::DiscSurface with \( r_{inner}>0\) and \( \phi < \pi \), parallel to \( xy \) plane at negative \(z\)
positiveFaceXY [1] : Acts::DiscSurface with \( r_{inner}>0 \) and \( \phi < \pi \), parallel to \( xy \) plane at positive \(z\)
tubeSectorOuterCover [2] : Acts::CylinderSurface with \( r = r_{outer}\)
tubeSectorInnerCover [3] : Acts::CylinderSurface with \( r = r_{inner} \)
tubeSectorNegativePhi [4] : Rectangular Acts::PlaneSurface attached to [0] and [1] at negative \( \phi \)
tubeSectorNegativePhi [5] :
Public Types
-
enum BoundValues
for streaming and access
Values:
-
enumerator eMinR
-
enumerator eMaxR
-
enumerator eHalfLengthZ
-
enumerator eHalfPhiSector
-
enumerator eAveragePhi
-
enumerator eBevelMinZ
-
enumerator eBevelMaxZ
-
enumerator eSize
-
enumerator eMinR
-
enum class Face : unsigned int
Enum describing the possible faces of a cylinder volume.
Note
These values are synchronized with the BoundarySurfaceFace enum. Once Gen1 is removed, this can be changed.
Values:
-
enumerator PositiveDisc
-
enumerator NegativeDisc
-
enumerator OuterCylinder
-
enumerator InnerCylinder
-
enumerator NegativePhiPlane
-
enumerator PositivePhiPlane
-
enumerator PositiveDisc
Public Functions
-
CylinderVolumeBounds() = delete
-
CylinderVolumeBounds(const CylinderBounds &cBounds, double thickness)
Constructor - extruded from cylinder bounds and thickness.
- Parameters:
cBounds – the cylinder bounds
thickness – of the extrusion
-
CylinderVolumeBounds(const CylinderVolumeBounds &cylbo)
Copy Constructor.
- Parameters:
cylbo – is the source cylinder volume bounds for the copy
-
CylinderVolumeBounds(const RadialBounds &rBounds, double thickness)
Constructor - extruded from radial bounds and thickness.
- Parameters:
rBounds – the Radial bounds
thickness –
-
explicit CylinderVolumeBounds(const std::array<double, eSize> &values)
Constructor - from a fixed size array.
- Parameters:
values – The bound values
-
CylinderVolumeBounds(double rmin, double rmax, double halfz, double halfphi = std::numbers::pi, double avgphi = 0., double bevelMinZ = 0., double bevelMaxZ = 0.)
Constructor.
- Parameters:
rmin – The inner radius of the cylinder
rmax – The outer radius of the cylinder
halfz – The half length in z
halfphi – The half lopening angle
avgphi – The average phi value
bevelMinZ – The bevel angle, in radians, for the negative side
bevelMaxZ – The bevel angle, in radians, for the positive side
-
~CylinderVolumeBounds() override = default
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline virtual std::vector<AxisDirection> canonicalAxes() const override
Get the canonical binning directions, i.e.
the axis directions that fully describe the shape’s extent
- Returns:
vector of canonical binning values
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The requested bound value
-
virtual bool inside(const Vector3 &pos, double tol = 0.) const override
This method checks if position in the 3D volume frame is inside the cylinder.
- Parameters:
pos – is a global position to be checked
tol – is the tolerance for the check
- Returns:
True if the position is inside the cylinder bounds
-
CylinderVolumeBounds &operator=(const CylinderVolumeBounds &cylbo) = default
Assignment operator.
- Parameters:
cylbo – Source cylinder volume bounds to copy from
- Returns:
Reference to this object after assignment
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const override
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
virtual double referenceBorder(AxisDirection aDir) const override
Binning borders in double.
- Parameters:
aDir – is the axis direction used for the binning
- Returns:
Reference border value for the given axis direction
-
virtual Vector3 referenceOffset(AxisDirection aDir) const override
Binning offset - overloaded for some R-binning types.
- Parameters:
aDir – is the axis direction used for the binning
- Returns:
Reference offset vector for the given axis direction
-
void set(BoundValues bValue, double value)
Set a bound value.
- Parameters:
bValue – the bound value identifier
value – the value to be set
-
void set(std::initializer_list<std::pair<BoundValues, double>> keyValues)
Set a range of bound values.
- Parameters:
keyValues – the initializer list of key value pairs
-
virtual std::ostream &toStream(std::ostream &os) const override
Output Method for std::ostream.
- Parameters:
os – is the output stream
- Returns:
Reference to the output stream after writing
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
class CylinderVolumeBuilder : public Acts::ITrackingVolumeBuilder
A volume builder to be used for building concentric cylinder volumes.
a) configured volume
b) wrapping around a cylindrical/disk layer config
All are optionally wrapped around a given volume which has to by a cylinder volume and which has to be center at z == 0
To receive the tracking volume it is possible to also hand over a triple of layers, which is a C++ tuple of three pointers to layer vectors (defined in the ITrackingVolumeBuilder). This functionality is needed for a possible translation of an geometry existing in another format. The first entry represents the layers of the negative endcap, the second the layers of the barrel and the third the layers of the positive endcap. If the one of these pointers is a nullptr no layers will be created for this volume
For the endcap region it is possible to check for a ring layout, in which case an attempt to split into individual ring volumes is done
Public Functions
-
explicit CylinderVolumeBuilder(const Config &cvbConfig, std::unique_ptr<const Logger> logger = getDefaultLogger("CylinderVolumeBuilder", Logging::INFO))
Constructor.
- Parameters:
cvbConfig – [in] is the configuration struct to steer the builder
logger – [in] logging instance
-
~CylinderVolumeBuilder() override
Destructor.
-
VolumeConfig analyzeContent(const GeometryContext &gctx, const LayerVector &lVector, const MutableTrackingVolumeVector &mtvVector) const
Analyze the config to gather needed dimension.
- Parameters:
gctx – [in] the geometry context for this building
lVector – [in] is the vector of layers that are parsed
mtvVector – [in] Vector of mutable tracking volumes to analyze
- Returns:
a VolumeConfig representing this layer
-
inline Config getConfiguration() const
Get configuration method.
Return the configuration object.
- Returns:
a copy of the config object
-
void setConfiguration(const Config &cvbConfig)
Set configuration method.
- Parameters:
cvbConfig – [in] is the new configuration to be set
-
void setLogger(std::unique_ptr<const Logger> newLogger)
set logging instance
- Parameters:
newLogger – [in] is the logging instance to be set
CylinderVolumeBuilder main call method.
- Parameters:
gctx – [in] geometry context for which this cylinder volume is built
existingVolume – [in] is an (optional) volume to be included
externalBounds – [in] are (optional) external confinement constraints
- Returns:
a mutable pointer to a new TrackingVolume which includes the optionally provided existingVolume consistently for further processing
-
struct Config
Nested configuration struct for this CylinderVolumeBuilder.
Public Members
-
std::array<std::shared_ptr<const ISurfaceMaterial>, 6> boundaryMaterial{nullptr, nullptr, nullptr, nullptr, nullptr, nullptr}
—————–— MB (outer [1]) ————— | MB [2] NEC MB [3] | B | MB [4] PEC MB [5] | —————–— MB (inner [0]) —————
-
bool buildToRadiusZero = false
Build the volume to the beam line.
-
bool checkRingLayout = false
Check for endcap ring layout.
-
std::shared_ptr<const IConfinedTrackingVolumeBuilder> ctVolumeBuilder = nullptr
Builder to construct confined volumes within the volume.
-
std::shared_ptr<const ILayerBuilder> layerBuilder = nullptr
Builder to construct layers within the volume.
-
std::pair<double, double> layerEnvelopeR = {1. * UnitConstants::mm, 1. * UnitConstants::mm}
Additional envelope in R to create rMin, rMax.
-
double layerEnvelopeZ = 1. * UnitConstants::mm
the additional envelope in Z to create zMin, zMax
-
double ringTolerance = 0 * UnitConstants::mm
Tolerance for endcap ring association.
-
std::shared_ptr<const ITrackingVolumeHelper> trackingVolumeHelper = nullptr
The tracking volume helper for construction.
-
std::shared_ptr<const IVolumeMaterial> volumeMaterial = nullptr
The world material.
-
std::string volumeName = ""
The string based identification.
-
std::array<std::shared_ptr<const ISurfaceMaterial>, 6> boundaryMaterial{nullptr, nullptr, nullptr, nullptr, nullptr, nullptr}
-
class CylinderVolumeStack : public Acts::VolumeStack
This class implements a z-aligned or r-aligned stack of cylinder volumes with synchronized bounds.
Externally, it presents as a single volume. On construction, the input volumes are modified so that they are connected in z and r and have synchronized bounds. The way this is done can be configured using an attachment and a resize strategy. Depending on the configuration, the input volumes are either extended or gap volumes are created.
Note
The volumes are never shrunk, because this would potentially result in overlaps of the resulting volumes bounds.
Public Functions
-
CylinderVolumeStack(const GeometryContext &gctx, std::vector<Volume*> &volumes, AxisDirection direction, VolumeAttachmentStrategy strategy, std::pair<VolumeResizeStrategy, VolumeResizeStrategy> resizeStrategies, const Logger &logger = Acts::getDummyLogger())
Constructor from a vector of volumes and direction.
Note
resizeStrategyonly affects resizing alongdirection. Resizing in the other direction is always delegated to the child volumes, which might in turn beCylinderVolumeStackNote
The first element of
resizeStrategiesis used for the low end and the second element is used for the high end of the stackNote
Preconditions are checked on construction
- Parameters:
gctx – The current geometry context object, e.g. alignment
volumes – is the vector of volumes
direction – is the binning direction
strategy – is the attachment strategy
resizeStrategies – is the resize strategies
logger – is the logger
- Pre:
The volumes need to have a common coordinate system relative to
direction. I.e. they need to be aligned inzand cannot have a rotation inxory.- Pre:
The volumes all need to have
CylinerVolumeBoundsand cannot have a \(\phi\) sector or bevels.
-
CylinderVolumeStack(const GeometryContext &gctx, std::vector<Volume*> &volumes, AxisDirection direction, VolumeAttachmentStrategy strategy = VolumeAttachmentStrategy::Midpoint, VolumeResizeStrategy resizeStrategy = VolumeResizeStrategy::Expand, const Logger &logger = Acts::getDummyLogger())
Constructor from a vector of volumes and direction.
Note
resizeStrategyonly affects resizing alongdirection. Resizing in the other direction is always delegated to the child volumes, which might in turn beCylinderVolumeStackNote
resizeStrategyis used for both ends of the stackNote
Preconditions are checked on construction
- Parameters:
gctx – The current geometry context object, e.g. alignment
volumes – is the vector of volumes
direction – is the binning direction
strategy – is the attachment strategy
resizeStrategy – is the resize strategy
logger – is the logger
- Pre:
The volumes need to have a common coordinate system relative to
direction. I.e. they need to be aligned inzand cannot have a rotation inxory.- Pre:
The volumes all need to have
CylinerVolumeBoundsand cannot have a \(\phi\) sector or bevels.
Update the volume bounds and transform.
This will update the bounds of all volumes in the stack to accommodate the new bounds and optionally create gap volumes according to the resize strategy set during construction.
- Parameters:
gctx – The current geometry context object, e.g. alignment
volbounds – is the new bounds
transform – is the new transform
logger – is the logger
- Pre:
The volume bounds need to be of type
CylinderVolumeBounds.
-
CylinderVolumeStack(const GeometryContext &gctx, std::vector<Volume*> &volumes, AxisDirection direction, VolumeAttachmentStrategy strategy, std::pair<VolumeResizeStrategy, VolumeResizeStrategy> resizeStrategies, const Logger &logger = Acts::getDummyLogger())
-
template<typename, typename H = void, DelegateType = DelegateType::NonOwning>
class Delegate
Warning
doxygenclass: Cannot find class “Acts::DetectorElementBase” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
class DiamondBounds : public Acts::PlanarBounds
Bounds for a double trapezoidal (“diamond”), planar Surface.

Public Types
Public Functions
-
inline explicit DiamondBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from fixed size array.
- Parameters:
values – The parameter values
-
inline DiamondBounds(double halfXnegY, double halfXzeroY, double halfXposY, double halfYneg, double halfYpos) noexcept(false)
Constructor for convex hexagon symmetric about the y axis.
- Parameters:
halfXnegY – is the halflength in x at minimal y
halfXzeroY – is the halflength in x at y = 0
halfXposY – is the halflength in x at maximal y
halfYneg – is the halflength into y < 0
halfYpos – is the halflength into y > 0
-
virtual const RectangleBounds &boundingBox() const final
Bounding box parameters.
- Returns:
rectangle bounds for a bounding box
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For DiamondBounds: returns center of symmetry (0,0)
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
Value of the specified bound parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – is the ostream in which it is dumped
- Returns:
Reference to the output stream after writing
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
inline explicit DiamondBounds(const std::array<double, eSize> &values) noexcept(false)
-
class DiamondVolumeBounds : public Acts::VolumeBounds
Bounds for a polygonal prism shaped Volume, the orientedSurface(…) method creates a vector of 8 surfaces: 2 Diamond Shape Surfaces (see.
and 6 Rectangular Shape Surfaces.
BoundarySurfaceFace [index]:
negativeFaceXY [0] : Diamond Acts::PlaneSurface, parallel to \( xy \) plane at negative \( z \)
positiveFaceXY [1] : Diamond Acts::PlaneSurface, parallel to \( xy \) plane at positive \( z \)
negativeXFaceYZ12 [2] : Rectangular Acts::PlaneSurface, parallel to \( yz \) plane at negative \( x \) attached at [-x1,-y1] and [-x2,0]
positiveXFaceYZ12 [3] : Rectangular Acts::PlaneSurface, parallel to \( yz \) plane at positive \( x \) attached at [x1,-y1] and [x2,0]
negativeXFaceYZ23 [4] : Rectangular Acts::PlaneSurface, parallel to \( yz \) plane at negative \( x \) attached at [-x2,0] and [-x3,y2]
positiveXFaceYZ23 [5] : Rectangular Acts::PlaneSurface, parallel to \( yz \) plane at positive \( x \) attached at [x2,0] and [x3,y2]
negativeYFaceZX [6] : Rectangular Acts::PlaneSurface, parallel to \( zx \) plane at negative \( y \)
positiveYFaceZX [7] : Rectangular Acts::PlaneSurface, parallel to \( zx \) plane at positive \( y \)
Public Types
-
enum BoundValues
for access / streaming
Values:
-
enumerator eHalfLengthX1
half length in x at positive y1
-
enumerator eHalfLengthX2
half length in x at y=0
-
enumerator eHalfLengthX3
half length in x at negative y2
-
enumerator eLengthY1
length in positive y1
-
enumerator eLengthY2
length in negative y2
-
enumerator eHalfLengthZ
half length in z
-
enumerator eAlphaAngle
angle alpha between negYFaceZX and faceYZ12
-
enumerator eBetaAngle
angle beta between FaceYZ12 and FaceYZ23
-
enumerator eSize
length of the bounds vector
-
enumerator eHalfLengthX1
-
enum class Face : unsigned int
Enumeration of faces of the diamond volume.
Values:
-
enumerator NegativeZFaceXY
-
enumerator PositiveZFaceXY
-
enumerator NegativeXFaceYZ12
-
enumerator PositiveXFaceYZ12
-
enumerator NegativeXFaceYZ23
-
enumerator PositiveXFaceYZ23
-
enumerator NegativeYFaceZX
-
enumerator PositiveYFaceZX
-
enumerator NegativeZFaceXY
Public Functions
-
DiamondVolumeBounds(const DiamondVolumeBounds &other) = default
Copy constructor.
- Parameters:
other – The other DiamondVolumeBounds to copy from
-
explicit DiamondVolumeBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from a vector of bound values.
- Parameters:
values – The bound values (eSize elements)
-
DiamondVolumeBounds(DiamondVolumeBounds &&other) = default
Move constructor.
- Parameters:
other – The other DiamondVolumeBounds to move from
-
DiamondVolumeBounds(double x1, double x2, double x3, double y1, double y2, double halez) noexcept(false)
Constructor - the polygonal prism boundaries.
- Parameters:
x1 – is the half length in x at negative y1
x2 – is the half length in x at y=0
x3 – is the half length in x at positive y2
y1 – is the positive y extent
y2 – is the negative y extent
halez – is the half length in z
-
~DiamondVolumeBounds() override = default
Default destructor.
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The bound value at the specified index
-
virtual bool inside(const Vector3 &pos, double tol = 0.) const final
This method checks if position in the 3D volume frame is inside the cylinder.
- Parameters:
pos – is the global position to be checked
tol – is the tolerance applied
- Returns:
boolean indicator if position is inside
-
DiamondVolumeBounds &operator=(const DiamondVolumeBounds &other) = default
Copy constructor assignment.
- Parameters:
other – The other DiamondVolumeBounds to copy from
- Returns:
Reference to this object
-
DiamondVolumeBounds &operator=(DiamondVolumeBounds &&other) = default
Move constructor assignment.
- Parameters:
other – The other DiamondVolumeBounds to move from
- Returns:
Reference to this object
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const final
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
virtual std::ostream &toStream(std::ostream &os) const override
Output Method for std::ostream.
- Parameters:
os – is the output stream
- Returns:
Modified ostream for chaining
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
A fully guided navigator.
This is a fully guided navigator that progresses through a provided sequence of surfaces.
This can either be used as a validation tool, for truth tracking, or track refitting.
Public Functions
Constructor with optional logger.
- Parameters:
_logger – Logger instance for navigation messages
Check if the current target is still valid.
This function checks if the target is valid. For the direct navigator this is always true.
- Parameters:
state – The navigation state
position – The current position
direction – The current direction
- Returns:
True if the target is valid
Get the current surface from the navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to current surface, nullptr if none
Get the current tracking volume (not used by DirectNavigator)
- Parameters:
state – The navigation state (unused)
- Returns:
Always returns nullptr as DirectNavigator doesn’t use volumes
Get the current volume material (not used by DirectNavigator)
- Parameters:
state – The navigation state (unused)
- Returns:
Always returns nullptr as DirectNavigator doesn’t use volume material
Check if the end of world has been reached (not applicable for DirectNavigator)
- Parameters:
state – The navigation state (unused)
- Returns:
Always returns false as DirectNavigator operates on a surface sequence
Handle the surface reached.
This function handles the surface reached. For the direct navigator this effectively sets the current surface to the reached surface.
- Parameters:
state – The navigation state
position – The current position
direction – The current direction
surface – The surface reached
Initialize the navigator.
This function initializes the navigator for a new propagation.
- Parameters:
state – The navigation state
position – The start position
direction – The start direction
propagationDirection – The propagation direction
- Returns:
Always returns success result as DirectNavigator initialization cannot fail
Create a new navigation state from options.
- Parameters:
options – The navigator options
- Returns:
New state initialized with the provided options
Check if navigation should break/stop.
- Parameters:
state – The navigation state
- Returns:
True if navigation should break, false otherwise
Get the next target surface.
This function gets the next target surface for the propagation. For the direct navigator this is always the next surface in the sequence.
- Parameters:
state – The navigation state
position – The current position
direction – The current direction
- Returns:
The next target surface
Get the start surface from the navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to start surface, nullptr if none
Get the target surface from the navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to target surface, nullptr if none
The nested configuration struct.
The nested options struct.
Public Functions
Constructor from geometry context.
- Parameters:
gctx – The geometry context
Set the plain navigator options.
- Parameters:
options – The plain navigator options to copy
Public Members
The far limit to resolve surfaces.
Distance limit to discard intersections “behind us”.
Note
this is only necessary because some surfaces have more than one intersection
The surface tolerance.
Nested State struct.
It acts as an internal state which is created for every propagation/extrapolation step and keep thread-local navigation information
Public Functions
Constructor from options.
- Parameters:
options_ – The navigator options
Check if we have reached the end of the surface sequence.
- Returns:
True if no more surfaces remain in the propagation direction
Get the current navigation surface.
- Returns:
Reference to the surface at the current surface index
Move to the next surface in the sequence Increments or decrements surface index based on propagation direction.
Get the number of surfaces remaining in the sequence.
- Returns:
Number of surfaces left to process in the propagation direction
Reset the surface index to the initial position Sets index to before first surface (forward) or after last surface (backward)
Public Members
Navigation state - external interface: the current surface.
Propagation direction (forward or backward)
Navigation state - external interface: a break has been detected.
Configuration options for the direct navigator.
Navigation statistics.
Index of the next surface to try.
Note
-1 means before the first surface in the sequence and size() means after the last surface in the sequence
-
class Direction
The direction is always with respect to a given momentum, surface normal or other general axes.
Unnamed Group
- inline friend constexpr friend int operator* (Direction dir, int value)
Arithmetic operators.
Multiply Direction with integer
- Parameters:
dir – Direction value
value – Integer to multiply
- Returns:
Signed integer result
- inline friend constexpr friend float operator* (Direction dir, float value)
Multiply Direction with float.
- Parameters:
dir – Direction value
value – Float to multiply
- Returns:
Signed float result
- inline friend constexpr friend double operator* (Direction dir, double value)
Multiply Direction with double.
- Parameters:
dir – Direction value
value – Double to multiply
- Returns:
Signed double result
-
inline friend Acts::Vector3 operator*(Direction dir, const Acts::Vector3 &value)
Multiply Direction with Vector3.
- Parameters:
dir – Direction value
value – Vector3 to multiply
- Returns:
Signed Vector3 result
- inline friend constexpr friend int operator* (int value, Direction dir)
Multiply integer with Direction.
- Parameters:
value – Integer to multiply
dir – Direction value
- Returns:
Signed integer result
- inline friend constexpr friend float operator* (float value, Direction dir)
Multiply float with Direction.
- Parameters:
value – Float to multiply
dir – Direction value
- Returns:
Signed float result
- inline friend constexpr friend double operator* (double value, Direction dir)
Multiply double with Direction.
- Parameters:
value – Double to multiply
dir – Direction value
- Returns:
Signed double result
-
inline friend Acts::Vector3 operator*(const Acts::Vector3 &value, Direction dir)
Multiply Vector3 with Direction.
- Parameters:
value – Vector3 to multiply
dir – Direction value
- Returns:
Signed Vector3 result
- inline friend constexpr friend int operator*= (int &value, Direction dir)
Multiply-assign integer with Direction.
- Parameters:
value – Integer reference to modify
dir – Direction value
- Returns:
Reference to modified integer
- inline friend constexpr friend float operator*= (float &value, Direction dir)
Multiply-assign float with Direction.
- Parameters:
value – Float reference to modify
dir – Direction value
- Returns:
Reference to modified float
- inline friend constexpr friend double operator*= (double &value, Direction dir)
Multiply-assign double with Direction.
- Parameters:
value – Double reference to modify
dir – Direction value
- Returns:
Reference to modified double
Public Functions
-
inline constexpr std::size_t index() const
Convert dir to index [0,1] which allows to store direction dependent objects in std::array<T, 2u>
- Returns:
either 0 or 1
-
constexpr bool operator==(const Direction &rhs) const noexcept = default
Check if two directions are equal.
- Parameters:
rhs – The Direction to compare to
- Returns:
True if the two Directions are equal, false otherwise
-
inline constexpr int sign() const
Turns the direction into a signed value.
- Returns:
a signed value
-
std::string toString() const
Convert direction to string representation.
- Returns:
String representation of the direction (“positive” or “negative”)
Public Static Functions
-
static inline constexpr Direction AlongNormal()
Create direction along normal (positive)
- Returns:
Direction with positive value, along surface normal
-
static inline constexpr Direction Backward()
Create backward direction (equivalent to negative)
- Returns:
Direction with negative value for backward propagation
-
static inline constexpr Direction Forward()
Create forward direction (equivalent to positive)
- Returns:
Direction with positive value for forward propagation
-
static inline constexpr Direction fromIndex(std::size_t index)
Convert and index [0,1] to a direction e.g.
for sorting in std::array<T, 2u>
- Parameters:
index – is the direction at input
- Returns:
Direction corresponding to the index (0->Negative, 1->Positive)
-
static inline constexpr Direction fromScalar(double scalar)
This turns a signed value into a direction.
Will assert on zero.
- Parameters:
scalar – is the signed value
- Returns:
a direction enum
-
static inline constexpr Direction fromScalarZeroAsPositive(double scalar)
This turns a signed value into a direction and 0 will be handled as a positive direction.
Only use this when you are convinced that the 0 case is properly handled downstream.
- Parameters:
scalar – is the signed value
- Returns:
a direction enum
-
static inline constexpr Direction Negative()
Create negative direction (-1)
- Returns:
Direction with negative value
-
class DiscBounds : public Acts::SurfaceBounds
common base class for all bounds that are in a r/phi frame
simply introduced to avoid wrong bound assignments to surfaces
Subclassed by Acts::AnnulusBounds, Acts::DiscTrapezoidBounds, Acts::RadialBounds
Public Functions
-
virtual double binningValuePhi() const = 0
Returns a refererance phi for binning.
- Returns:
Reference phi angle value used for binning purposes
-
virtual double binningValueR() const = 0
Returns a reference radius for binning.
- Returns:
Reference radius value used for binning purposes
-
virtual bool coversFullAzimuth() const = 0
Returns true for full phi coverage.
- Returns:
True if the bounds cover the full azimuthal range, false otherwise
-
virtual bool insideRadialBounds(double R, double tolerance = 0.) const = 0
Checks if it’s inside the radius.
- Parameters:
R – The radius value to check
tolerance – The tolerance for the check
- Returns:
True if the radius is within the bounds, false otherwise
-
virtual double rMax() const = 0
Return method for outer Radius.
- Returns:
Maximum radius of the disc bounds
-
virtual double rMin() const = 0
Return method for inner Radius.
- Returns:
Minimum radius of the disc bounds
-
virtual std::vector<Vector2> vertices(unsigned int quarterSegments = 2u) const = 0
Return the vertices.
- Parameters:
quarterSegments – The number of segments used to describe a quarter of a circle, if it is 1, then only the extrema points in phi are inserted next to the segment corners
- Returns:
vector for vertices in 2D
-
class DiscLayer : public virtual Acts::DiscSurface, public Acts::Layer
Class to describe a disc-like detector layer for tracking, it inherits from both, Layer base class and DiscSurface class.
Public Functions
-
DiscLayer() = delete
-
~DiscLayer() override = default
-
virtual const DiscSurface &surfaceRepresentation() const override
Transforms the layer into a Surface representation for extrapolation.
- Returns:
This method returns a surface reference
-
virtual DiscSurface &surfaceRepresentation() override
Non-const version of surface representation access.
- Returns:
Mutable reference to the disc surface
Public Static Functions
Factory constructor with DiscSurface components.
- Parameters:
transform – is the transform to place the layer in the 3D frame
dbounds – are the disc bounds that describe the layer dimensions
surfaceArray – is the array of sensitive surfaces
thickness – is the layer thickness (along the normal vector)
ad – is the approach descriptor that provides the approach surface
laytyp – is the layer type
- Returns:
a sharted pointer to the new layer
-
DiscLayer() = delete
-
class DiscSurface : public Acts::RegularSurface
Class for a disc surface (or a segment thereof)
The DiscSurface is defined by the local polar coordinates \( (r,phi) \).
The surface transform positions the disc such that the origin is at \( r=0 \), independent of the provided
DiscBounds. The normal vector of the disc (i.e., the local \(z\)-axis) is given by \( \vec e_{z} = \vec e_{r} \times\vec e_{phi} \).The disc surface The only surface type for which the covariance matrix is NOT given in the reference frame. A conversion from polar to cartesian coordinates needs to happen to transfer the local coordinates onto the cartesian reference frame coordinates.
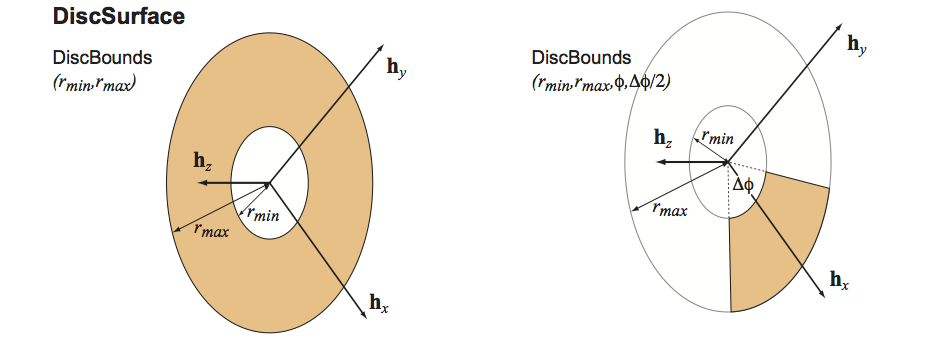
Subclassed by Acts::DiscLayer
Public Functions
Overwrite the existing surface bounds with new ones.
- Parameters:
newBounds – Pointer to the new bounds
-
virtual const SurfaceBounds &bounds() const final
This method returns the bounds by reference.
- Returns:
Reference to the surface bounds
-
const std::shared_ptr<const DiscBounds> &boundsPtr() const
This method returns the shared_ptr to the DiscBounds.
- Returns:
Shared pointer to the disc bounds
-
virtual BoundToFreeMatrix boundToFreeJacobian(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the jacobian from local to global which the surface knows best, hence the calculation is done here.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Jacobian from local to global
-
virtual FreeToBoundMatrix freeToBoundJacobian(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the jacobian from global to local which the surface knows best, hence the calculation is done here.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Jacobian from global to local
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
Convert a global position to a local one this is the most generic interface, which is implemented by all surfaces.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
direction – is the direction of the local position (ignored for
RegularSurface)tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const final
Global to local transformation.
Note
the direction is ignored for Disc surfaces in this calculateion
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
tolerance – optional tolerance within which a point is considered valid on surface
- Returns:
a Result<Vector2> which can be !ok() if the operation fails
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const = 0
Convert a global position to a local one.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
Vector2 globalToLocalCartesian(const GeometryContext &gctx, const Vector3 &position, double tol = 0.) const
Special method for DiscSurface : global<->local from cartesian coordinates.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is a global cartesian 3D position
tol – The absolute tolerance parameter
- Returns:
value is a local polar
-
virtual MultiIntersection3D intersect(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::Infinite(), double tolerance = s_onSurfaceTolerance) const final
Straight line intersection schema.
Mathematical motivation:
the equation of the plane is given by: \( \vec n \cdot \vec x = \vec n \cdot \vec p,\) where \( \vec n = (n_{x}, n_{y}, n_{z})\) denotes the normal vector of the plane, \( \vec p = (p_{x}, p_{y}, p_{z})\) one specific point on the plane and \( \vec x = (x,y,z) \)
all possible points on the plane.
Given a line with:
\( \vec l(u) = \vec l_{1} + u \cdot \vec v \),
the solution for
\( u \) can be written: \( u = \frac{\vec n (\vec p - \vec l_{1})}{\vec n \vec v}\) If the denominator is 0 then the line lies:either in the plane
perpendicular to the normal of the plane
Note
expected to be normalized (no checking)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The global position as a starting point
direction – The global direction at the starting point
boundaryTolerance – The boundary check prescription
tolerance – the tolerance used for the intersection
- Returns:
The
MultiIntersection3Dobject
-
virtual Matrix<2, 3> localCartesianToBoundLocalDerivative(const GeometryContext &gctx, const Vector3 &position) const final
Calculate the derivative of bound track parameters local position w.r.t.
position in local 3D Cartesian coordinates
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position of the parameters in global
- Returns:
Derivative of bound local position w.r.t. position in local 3D cartesian coordinates
-
Vector3 localCartesianToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const
Special method for DiscSurface : local<->global transformation when provided cartesian coordinates.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is local 2D position in cartesian coordinates
- Returns:
value is a global cartesian 3D position
-
Vector2 localCartesianToPolar(const Vector2 &lcart) const
Special method for Disc surface : local<->local transformations polar <-> cartesian.
- Parameters:
lcart – is local 2D position in cartesian coordinates
- Returns:
value is a local position in polar coordinates
-
Vector2 localPolarToCartesian(const Vector2 &lpolar) const
Special method for DiscSurface : local<->local transformations polar <-> cartesian.
- Parameters:
lpolar – is a local position in polar coordinates
- Returns:
values is local 2D position in cartesian coordinates
-
Vector2 localPolarToLocalCartesian(const Vector2 &locpol) const
Special method for DiscSurface : local<->local transformations polar <-> cartesian.
- Parameters:
locpol – is a local position in polar coordinates
- Returns:
values is local 2D position in cartesian coordinates
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const final
Local to global transformation For planar surfaces the momentum direction is ignored in the local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
The global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const final
Local to global transformation.
This is the most generic interface, which is implemented by all surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
direction – global 3D momentum direction (ignored for
RegularSurface)
- Returns:
The global position by value
-
std::pair<std::shared_ptr<DiscSurface>, bool> mergedWith(const DiscSurface &other, AxisDirection direction, bool externalRotation, const Logger &logger = getDummyLogger()) const
Merge two disc surfaces into a single one.

Note
The surfaces need to be compatible, i.e. have disc bounds that align
Note
The returned boolean is
falseifthisis left or counter-clockwise ofother, andtrueif not.- Parameters:
other – The other disc surface to merge with
direction – The binning direction: either
AxisRorAxisPhiexternalRotation – If true, any phi rotation is done in the transform
logger – The logger to use
- Returns:
The merged disc surface and a boolean indicating if surfaces are reversed
-
virtual std::string name() const override
Return properly formatted class name for screen output.
- Returns:
String representation of the class name
-
Vector3 normal(const GeometryContext &gctx) const
Get the normal vector, independent of the location.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
The normal vector
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const final
Normal vector return.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – The local position is ignored
- Returns:
a Vector3 by value
-
Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Calculate the normal vector of the surface This overload requires an on-surface local position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position where the normal vector is constructed
- Returns:
normal vector by value
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const final
Calculate the normal vector of the surface This overload is fully generic, fulfills the Surface interface and accepts a global position and a direction.
For
RegularSurfacethis is equivalent to the normal overload, ignoring thedirection- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – is the global position where the normal vector is constructed
direction – is the direction of the normal vector (ignored for
RegularSurface)
- Returns:
Normal vector at the given position
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const final
Get the normal vector of this surface at a given global position.
Note
The
positionis required to be on-surface.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global positiono (for DiscSurface this is ignored)
- Returns:
The normal vector
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const = 0
Calculate the normal vector of the surface This overload accepts a global position.
- Parameters:
position – is the global position where the normal vector is constructed
gctx – The current geometry context object, e.g. alignment
- Returns:
normal vector by value
-
DiscSurface &operator=(const DiscSurface &other)
Assignment operator.
- Parameters:
other – The source sourface for the assignment
- Returns:
Reference to this DiscSurface after assignment
-
virtual double pathCorrection(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Path correction due to incident of the track.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The global position as a starting point
direction – The global momentum direction at the starting point
- Returns:
The correction factor due to incident
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int quarterSegments) const override
Return a Polyhedron for the surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
quarterSegments – Number of segments used to describe the quarter of a full circle
- Returns:
A list of vertices and a face/facett description of it
-
RotationMatrix3 referenceFrame(const GeometryContext &gctx) const
Return method for the reference frame This is the frame in which the covariance matrix is defined (specialized by all surfaces)
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
RotationMatrix3 which defines the three axes of the measurement frame
-
RotationMatrix3 referenceFrame(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Return method for the reference frame This is the frame in which the covariance matrix is defined (specialized by all surfaces)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
direction – global 3D momentum direction (optionally ignored)
- Returns:
RotationMatrix3 which defines the three axes of the measurement frame
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const final
A reference position for a given axis direction.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – The axis direction for the reference position request
- Returns:
position that can beused for this binning
-
virtual double referencePositionValue(const GeometryContext &gctx, AxisDirection aDir) const final
A reference position value for a given axis direction.
Note
This calls the parent method except for AxisR
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – the value generated for the reference position
- Returns:
float to be used for the binning schema
-
virtual SurfaceType type() const override
Return the surface type.
- Returns:
Surface type identifier
-
class DiscTrapezoidBounds : public Acts::DiscBounds
Class to describe the bounds for a planar DiscSurface.
By providing an argument for hphisec, the bounds can be restricted to a phi-range around the center position.
Public Types
Public Functions
-
inline explicit DiscTrapezoidBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from fixed size array.
- Parameters:
values – The parameter values
-
explicit DiscTrapezoidBounds(double halfXminR, double halfXmaxR, double minR, double maxR, double avgPhi = std::numbers::pi / 2., double stereo = 0.) noexcept(false)
Constructor for a symmetric Trapezoid giving min X length, max X length, Rmin and R max.
- Parameters:
halfXminR – half length in X at min radius
halfXmaxR – half length in X at maximum radius
minR – inner radius
maxR – outer radius
avgPhi – average phi value
stereo – optional stereo angle applied
-
inline virtual double binningValuePhi() const final
Return a reference phi for binning.
- Returns:
Average phi angle for binning purposes
-
inline virtual double binningValueR() const final
Return a reference radius for binning.
- Returns:
Average radius for binning purposes
-
virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline virtual bool coversFullAzimuth() const final
Returns true for full phi coverage - obviously false here.
- Returns:
Always false since disc trapezoids have limited phi coverage
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The value of the specified bound parameter
-
inline double halfLengthY() const
This method returns the half length in Y (this is Rmax -Rmin)
- Returns:
Half length in Y direction calculated from radial bounds
-
inline double halfPhiSector() const
This method returns the halfPhiSector which is covered by the disc.
- Returns:
Half phi sector angle covered by the disc trapezoid
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool insideRadialBounds(double R, double tolerance = 0.) const final
Checks if this is inside the radial coverage given the a tolerance.
- Parameters:
R – The radius value to check
tolerance – The tolerance for the check
- Returns:
True if radius is within bounds (plus tolerance), false otherwise
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
inline double rCenter() const
This method returns the center radius.
- Returns:
Center radius calculated from inner and outer bounds
-
inline virtual double rMax() const final
This method returns outer radius.
- Returns:
Maximum radius of the disc trapezoid
-
inline virtual double rMin() const final
This method returns inner radius.
- Returns:
Minimum radius of the disc trapezoid
-
inline double stereo() const
This method returns the stereo angle.
- Returns:
Stereo angle of the disc trapezoid
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – The output stream to write to
- Returns:
Reference to the output stream after writing
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
virtual std::vector<Vector2> vertices(unsigned int ignoredSegments = 0u) const final
This method returns the xy coordinates of the four corners of the bounds in module coorindates (in xy)
- Parameters:
ignoredSegments – is an ignored parameter only used for curved bound segments
- Returns:
vector for vertices in 2D
-
inline explicit DiscTrapezoidBounds(const std::array<double, eSize> &values) noexcept(false)
-
template<typename extension_t = EigenStepperDefaultExtension>
class EigenStepper Runge-Kutta-Nystroem stepper based on Eigen implementation for the following ODE:
r = (x,y,z) … global position T = (Ax,Ay,Az) … momentum direction (normalized)
dr/ds = T dT/ds = q/p * (T x B)
with s being the arc length of the track, q the charge of the particle, p the momentum magnitude and B the magnetic field
Public Types
-
using BoundParameters = BoundTrackParameters
Type alias for bound track parameters.
-
using BoundState = std::tuple<BoundParameters, Jacobian, double>
Bound state tuple containing parameters, Jacobian, and path length.
-
using Covariance = BoundMatrix
Type alias for covariance matrix.
-
using Jacobian = BoundMatrix
Type alias for jacobian matrix.
Public Functions
-
inline explicit EigenStepper(const Config &config)
Constructor with configuration.
- Parameters:
config – [in] The configuration of the stepper
Constructor requires knowledge of the detector’s magnetic field.
- Parameters:
bField – The magnetic field provider
-
inline double absoluteMomentum(const State &state) const
Absolute momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Absolute momentum magnitude
-
Result<BoundState> boundState(State &state, const Surface &surface, bool transportCov = true, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Create and return the bound state at the current position.
This transports (if necessary) the covariance to the surface and creates a bound state. It does not check if the transported state is at the surface, this needs to be guaranteed by the propagator
- Parameters:
state – [in] State that will be presented as
BoundStatesurface – [in] The surface to which we bind the state
transportCov – [in] Flag steering covariance transport
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
- Returns:
A bound state:
the parameters at the surface
the stepwise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline double charge(const State &state) const
Charge access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Electric charge of the particle
-
BoundState curvilinearState(State &state, bool transportCov = true) const
Create and return a curvilinear state at the current position.
This transports (if necessary) the covariance to the current position and creates a curvilinear state.
- Parameters:
state – [in] State that will be presented as
CurvilinearStatetransportCov – [in] Flag steering covariance transport
- Returns:
A curvilinear state:
the curvilinear parameters at given position
the stepweise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline Vector3 direction(const State &state) const
Momentum direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Current normalized direction vector
-
inline Result<Vector3> getField(State &state, const Vector3 &pos) const
Get the field for the stepping, it checks first if the access is still within the Cell, and updates the cell if necessary.
- Parameters:
state – [inout] is the propagation state associated with the track the magnetic field cell is used (and potentially updated)
pos – [in] is the field position
- Returns:
Magnetic field vector at the given position or error
-
inline double getStepSize(const State &state, ConstrainedStep::Type stype) const
Get the step size.
- Parameters:
state – [in] The stepping state (thread-local cache)
stype – [in] The step size type to be returned
- Returns:
Current step size for the specified constraint type
-
void initialize(State &state, const BoundParameters &par) const
Initialize the stepper state from bound track parameters.
- Parameters:
state – Stepper state to initialize
par – Bound track parameters to initialize from
-
void initialize(State &state, const BoundVector &boundParams, const std::optional<BoundMatrix> &cov, ParticleHypothesis particleHypothesis, const Surface &surface) const
Initialize the stepper state from bound parameters and surface.
- Parameters:
state – Stepper state to initialize
boundParams – Vector of bound track parameters
cov – Optional covariance matrix
particleHypothesis – Particle hypothesis for the track
surface – Surface associated with the parameters
-
State makeState(const Options &options) const
Create a stepper state from given options.
- Parameters:
options – Configuration options for the stepper state
- Returns:
Initialized stepper state object
-
inline Vector3 momentum(const State &state) const
Momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Current momentum vector
-
inline std::string outputStepSize(const State &state) const
Output the Step Size - single component.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
- Returns:
String representation of the current step size
-
inline const ParticleHypothesis &particleHypothesis(const State &state) const
Particle hypothesis.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Reference to the particle hypothesis used
-
inline Vector3 position(const State &state) const
Global particle position accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Current global position vector
-
bool prepareCurvilinearState(State &state) const
If necessary fill additional members needed for curvilinearState.
Compute path length derivatives in case they have not been computed yet, which is the case if no step has been executed yet.
- Parameters:
state – [inout] The state of the stepper
- Returns:
true if nothing is missing after this call, false otherwise.
-
inline double qOverP(const State &state) const
QoP direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Charge over momentum (q/p) value
-
inline void releaseStepSize(State &state, ConstrainedStep::Type stype) const
Release the Step size.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stype – [in] The step size type to be released
-
Result<double> step(State &state, Direction propDir, const IVolumeMaterial *material) const
Perform a Runge-Kutta track parameter propagation step.
Note
The state contains the desired step size. It can be negative during backwards track propagation, and since we’re using an adaptive algorithm, it can be modified by the stepper class during propagation.
- Parameters:
state – [inout] State of the stepper
propDir – is the direction of propagation
material – is the optional volume material we are stepping through.
- Returns:
the result of the step
-
inline double time(const State &state) const
Time access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
The time coordinate from the free parameters vector
-
void transportCovarianceToBound(State &state, const Surface &surface, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
Note
no check is done if the position is actually on the surface
- Template Parameters:
surface_t – the Surface type
- Parameters:
state – [inout] State of the stepper
surface – [in] is the surface to which the covariance is forwarded to
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
-
void transportCovarianceToCurvilinear(State &state) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
- Parameters:
state – [inout] State of the stepper
-
void update(State &state, const FreeVector &freeParams, const BoundVector &boundParams, const Covariance &covariance, const Surface &surface) const
Method to update a stepper state to the some parameters.
- Parameters:
state – [inout] State object that will be updated
freeParams – [in] Free parameters that will be written into
stateboundParams – [in] Corresponding bound parameters used to update jacToGlobal in
statecovariance – [in] The covariance that will be written into
statesurface – [in] The surface used to update the jacToGlobal
-
void update(State &state, const Vector3 &uposition, const Vector3 &udirection, double qOverP, double time) const
Method to update the stepper state.
- Parameters:
state – [inout] State object that will be updated
uposition – [in] the updated position
udirection – [in] the updated direction
qOverP – [in] the updated qOverP value
time – [in] the updated time value
Update step size.
This method intersects the provided surface and update the navigation step estimation accordingly (hence it changes the state). It also returns the status of the intersection to trigger onSurface in case the surface is reached.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
target – [in] The NavigationTarget
direction – [in] The propagation direction
stype – [in] The step size type to be set
-
inline void updateStepSize(State &state, double stepSize, ConstrainedStep::Type stype) const
Update step size - explicitly with a double.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stepSize – [in] The step size value
stype – [in] The step size type to be set
-
inline IntersectionStatus updateSurfaceStatus(State &state, const Surface &surface, std::uint8_t index, Direction propDir, const BoundaryTolerance &boundaryTolerance, double surfaceTolerance, ConstrainedStep::Type stype, const Logger &logger = getDummyLogger()) const
Update surface status.
It checks the status to the reference surface & updates the step size accordingly
- Parameters:
state – [inout] The stepping state (thread-local cache)
surface – [in] The surface provided
index – [in] The surface intersection index
propDir – [in] The propagation direction
boundaryTolerance – [in] The boundary check for this status update
surfaceTolerance – [in] Surface tolerance used for intersection
stype – [in] The step size type to be set
logger – [in] A
Loggerinstance
- Returns:
Status of the intersection indicating whether surface was reached
-
struct Config
Configuration for the Eigen stepper.
Public Members
-
std::shared_ptr<const MagneticFieldProvider> bField
Magnetic field provider.
-
std::shared_ptr<const MagneticFieldProvider> bField
-
struct Options : public Acts::StepperPlainOptions
Stepper options including geometry and magnetic field contexts.
Public Functions
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
Constructor from geometry and magnetic field contexts.
- Parameters:
gctx – The geometry context
mctx – The magnetic field context
-
inline void setPlainOptions(const StepperPlainOptions &options)
Set plain options.
- Parameters:
options – The plain options to set
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
-
struct State
State for track parameter propagation.
It contains the stepping information and is provided thread local by the propagator
Public Functions
-
inline State(const Options &optionsIn, MagneticFieldProvider::Cache fieldCacheIn)
Constructor from the initial bound track parameters.
Note
the covariance matrix is copied when needed
- Parameters:
optionsIn – [in] is the options object for the stepper
fieldCacheIn – [in] is the cache object for the magnetic field
Public Members
-
Covariance cov = Covariance::Zero()
Covariance matrix for track parameter uncertainties.
-
bool covTransport = false
Covariance matrix (and indicator) associated with the initial error on track parameters.
-
FreeVector derivative = FreeVector::Zero()
The propagation derivative.
-
extension_t extension
Algorithmic extension.
-
MagneticFieldProvider::Cache fieldCache
This caches the current magnetic field cell and stays (and interpolates) within it as long as this is valid.
See step() code for details.
-
BoundToFreeMatrix jacToGlobal = BoundToFreeMatrix::Zero()
Jacobian from local to the global frame.
-
FreeMatrix jacTransport = FreeMatrix::Identity()
Pure transport jacobian part from runge kutta integration.
-
std::array<double, 4> kQoP = {}
k_i elements of the momenta
-
std::size_t nSteps = 0
Total number of performed steps.
-
std::size_t nStepTrials = 0
Totoal number of attempted steps.
-
FreeVector pars = FreeVector::Zero()
Internal free vector parameters.
-
ParticleHypothesis particleHypothesis = ParticleHypothesis::pion()
Particle hypothesis.
-
double pathAccumulated = 0.
Accumulated path length state.
-
double previousStepSize = 0.
Last performed step (for overstep limit calculation)
-
StepperStatistics statistics
Statistics of the stepper.
-
struct Acts::EigenStepper::State::[anonymous] stepData
Storage of magnetic field and the sub steps during a RKN4 step.
-
ConstrainedStep stepSize
Adaptive step size of the runge-kutta integration.
-
inline State(const Options &optionsIn, MagneticFieldProvider::Cache fieldCacheIn)
-
using BoundParameters = BoundTrackParameters
-
class EllipseBounds : public Acts::PlanarBounds
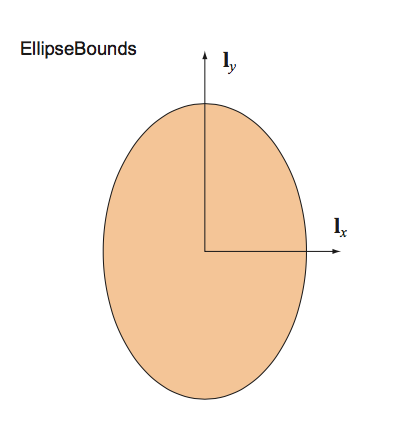
Class to describe the bounds for a planar ellispoid surface.
By providing an argument for hphisec, the bounds can be restricted to a phi-range around the center position.
Public Types
Public Functions
-
inline explicit EllipseBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from fixed size array.
- Parameters:
values – The parameter values
-
inline explicit EllipseBounds(double innerRx, double innerRy, double outerRx, double outerRy, double halfPhi = std::numbers::pi, double averagePhi = 0.) noexcept(false)
Constructor for full of an ellipsoid ring.
- Parameters:
innerRx – The inner ellipse radius in x
innerRy – The inner ellipse radius in y
outerRx – The outer ellipse radius in x
outerRy – The outer ellipse radius in y
halfPhi – spanning phi sector (is set to pi as default)
averagePhi – average phi (is set to 0. as default)
-
virtual const RectangleBounds &boundingBox() const final
Bounding box parameters.
- Returns:
rectangle bounds for a bounding box
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
Value of the specified bound parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – The output stream to write to
- Returns:
Reference to the output stream after writing
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
virtual std::vector<Vector2> vertices(unsigned int quarterSegments) const final
Return the vertices.
- Parameters:
quarterSegments – is the number of segments to approximate a quarter of a circle. In order to symmetrize fully closed and sectoral cylinders, also in the first case the two end points are given (albeit they overlap) in -pi / pi
- Returns:
vector for vertices in 2D
-
inline explicit EllipseBounds(const std::array<double, eSize> &values) noexcept(false)
-
class GainMatrixSmoother
Kalman trajectory smoother based on gain matrix formalism.
This implements not a single smoothing step, but the full backwards smoothing procedure for a filtered, forward trajectory using the stored linearization.
Public Types
Public Functions
-
Result<void> calculate(AnyMutableTrackStateProxy ts, AnyConstTrackStateProxy prev_ts, const Logger &logger) const
Calculate smoothed parameters for a single track state using gain matrix formalism.
- Parameters:
ts – Current track state to be smoothed
prev_ts – Previous track state (in forward direction)
logger – Logger for verbose output
- Returns:
Success or failure of the smoothing calculation
-
template<typename traj_t>
inline Result<void> operator()(const GeometryContext &gctx, traj_t &trajectory, std::size_t entryIndex, const Logger &logger = getDummyLogger()) const Run the Kalman smoothing for one trajectory.
- Parameters:
gctx – [in] The geometry context to be used
trajectory – [inout] The trajectory to be smoothed
entryIndex – [in] The index of state to start the smoothing
logger – [in] Where to write logging information to
- Returns:
Success or failure of the smoothing procedure
Public Members
-
bool doCovCheckAndAttemptFix = false
Whether to check the covariance matrices if they are semi-positive and if not attempt to correct them.
-
Result<void> calculate(AnyMutableTrackStateProxy ts, AnyConstTrackStateProxy prev_ts, const Logger &logger) const
-
class GainMatrixUpdater
Kalman update step using the gain matrix formalism.
Public Functions
-
GainMatrixUpdater() = default
-
inline explicit GainMatrixUpdater(bool useJosephFormulation)
- Parameters:
useJosephFormulation – Whether to use the Joseph formulation for the covariance update, which is more numerically stable at the cost of additional computations.
-
template<typename traj_t>
inline Result<void> operator()(const GeometryContext&, typename traj_t::TrackStateProxy trackState, const Logger &logger = getDummyLogger()) const Run the Kalman update step for a single trajectory state.
- Template Parameters:
kMeasurementSizeMax –
- Parameters:
trackState – [inout] The track state
logger – [in] Where to write logging information to
- Returns:
Success or failure of the update procedure
-
GainMatrixUpdater() = default
-
class GenericCuboidVolumeBounds : public Acts::VolumeBounds
Volume bounds described by eight arbitrary cuboid vertices.
Public Functions
-
GenericCuboidVolumeBounds() = delete
-
explicit GenericCuboidVolumeBounds(const std::array<Acts::Vector3, 8> &vertices) noexcept(false)
Constructor from a set of vertices.
The ordering is considered to be:
the first 4 vertices are the “top” face
the second 4 vertices are the “bottom” face
both faces are given in counter clock wise order
- Parameters:
vertices – The set of input vertices
-
explicit GenericCuboidVolumeBounds(const std::array<double, BoundValues::eSize> &values) noexcept(false)
Constructor from a fixed size array.
- Parameters:
values – The input values
-
~GenericCuboidVolumeBounds() override = default
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline virtual std::vector<AxisDirection> canonicalAxes() const override
Get the canonical direction values, i.e.
the axis directions that fully describe the shape’s extent
- Returns:
vector of canonical binning values
-
void draw(IVisualization3D &helper, const Transform3 &transform = Transform3::Identity()) const
Draw this shape using a visualization helper.
- Parameters:
helper – The visualizatin helper
transform – Optional transformation matrix
-
virtual bool inside(const Vector3 &gpos, double tol = 0.) const override
Checking if position given in volume frame is inside.
- Parameters:
gpos – is the global position to be checked
tol – is the tolerance applied for the inside check
- Returns:
boolean indicating if the position is inside
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const override
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
virtual std::ostream &toStream(std::ostream &sl) const override
- Parameters:
sl – is the output stream to be written into
- Returns:
The output stream
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
GenericCuboidVolumeBounds() = delete
-
class GeometryContext : public ContextType
This is the central definition of the Acts payload object regarding detector geometry status (e.g.
alignment)
It is propagated through the code to allow for event/thread dependent geometry changes.
Public Functions
- template<typename T> inline requires (!std::is_same_v< std::decay_t< T >, GeometryContext > &&!std::is_base_of_v< ContextType, std::decay_t< T > >) explicit GeometryContext(const T &value)
Copy construct from arbitrary type (inherited from ContextType)
- Template Parameters:
T – The type of the value to construct from
- Parameters:
value – The value to construct from
- template<typename T> inline requires (!std::is_same_v< std::decay_t< T >, GeometryContext > &&!std::is_base_of_v< ContextType, std::decay_t< T > >) explicit GeometryContext(T &&value)
Move construct from arbitrary type (inherited from ContextType)
- Template Parameters:
T – The type of the value to construct from
- Parameters:
value – The value to construct from
Public Static Functions
-
static inline GeometryContext dangerouslyDefaultConstruct()
Static factory method for default construction.
Note
Use this when you need a default context for testing or simple applications without alignment/conditions data
- Returns:
A default-constructed GeometryContext
-
template<typename value_t>
class GeometryHierarchyMap Store values mapped into the geometry hierarchy.
The core functionality is to find an equivalent element, i.e. an identifier-value pair, for a given geometry identifier via
Trailing zero levels of stored geometry identifiers are used as broadcast values to refer to higher-level objects within the geometry, e.g. a geometry identifier with vanishing approach and sensitive index identifies a layer. An entry will all geometry identifier levels set to zero acts as the global default value.auto it = container.find(GeometryIdentifier(...)); if (it != container.end()) { ... }
The container also supports range-based iteration over all stored elements
and index-based access to stored elements and associated geometry identifiersfor (const auto& element : container) { ... }
Adding elements is potentially expensive as the internal lookup structure must be updated. In addition, modifying an element in-place could change its identifier which would also break the lookup. Thus, the container can not be modified after construction to prevent misuse.GeometryIdentifier id3 = container.idAt(3); const auto& element4 = container.valueAt(4);
Note
No guarantees are given for the element order when using range-based or index-based access. Any apparent ordering must be considered an implementation detail and might change.
- Template Parameters:
value_t – stored value type
Public Types
-
using InputElement = typename std::pair<GeometryIdentifier, value_t>
Combined geometry identifier and value element. Only used for input.
Public Functions
-
GeometryHierarchyMap() = default
-
GeometryHierarchyMap(const GeometryHierarchyMap&) = default
Copy constructor.
-
GeometryHierarchyMap(GeometryHierarchyMap&&) noexcept = default
Move constructor.
-
inline GeometryHierarchyMap(std::initializer_list<InputElement> elements)
Construct the container from an initializer list.
- Parameters:
elements – input initializer list
-
inline explicit GeometryHierarchyMap(std::vector<InputElement> elements)
Construct the container from the given elements.
- Parameters:
elements – input elements (must be unique with respect to identifier)
-
~GeometryHierarchyMap() = default
-
inline Iterator begin() const
Return an iterator pointing to the beginning of the stored values.
- Returns:
Iterator to the first element
-
inline bool contains(const GeometryIdentifier &id) const
Check if the most specific value exists for a given geometry identifier.
This function checks if there is an element matching exactly the given geometry id, or from the element for the next available higher level within the geometry hierarchy.
- Parameters:
id – geometry identifier for which existence is being checked
- Return values:
<tt>true</tt> – if a matching element exists
<tt>false</tt> – if no matching element exists
-
inline bool empty() const
Check if any elements are stored.
- Returns:
True if the container is empty, false otherwise
-
inline Iterator end() const
Return an iterator pointing to the end of the stored values.
- Returns:
Iterator past the last element
-
inline Iterator find(const GeometryIdentifier &id) const
Find the most specific value for a given geometry identifier.
This can be either from the element matching exactly to the given geometry id, if it exists, or from the element for the next available higher level within the geometry hierarchy.
- Parameters:
id – geometry identifier for which information is requested
- Return values:
iterator – to an existing value
<tt>.end()</tt> – iterator if no matching element exists
-
inline GeometryIdentifier idAt(std::size_t index) const
Access the geometry identifier for the i-th element with bounds check.
- Parameters:
index – The index of the element to access
- Throws:
std::out_of_range – for invalid indices
- Returns:
The geometry identifier at the specified index
-
GeometryHierarchyMap &operator=(const GeometryHierarchyMap&) = default
Copy assignment operator.
- Returns:
Reference to this object for chaining
-
GeometryHierarchyMap &operator=(GeometryHierarchyMap&&) noexcept = default
Move assignment operator.
- Returns:
Reference to this object for chaining
-
inline std::size_t size() const
Return the number of stored elements.
- Returns:
Number of elements in the container
-
class GeometryIdentifier
Identifier for geometry nodes within the geometry hierarchy.
An identifier can be split into the following components. They define a hierarchy of objects starting from the high-level volumes:
Volume
Boundary surfaces (for a volume)
Layers (confined within a volume)
Approach surfaces (for a layer)
Sensitive surfaces (confined to a layer, also called modules)
Public Types
-
using Value = std::uint64_t
Type alias for underlying value type (64-bit unsigned integer)
Public Functions
-
GeometryIdentifier() = default
Construct default GeometryIdentifier with all values set to zero.
-
GeometryIdentifier(const GeometryIdentifier&) = default
Copy constructor.
-
GeometryIdentifier(GeometryIdentifier&&) = default
Move constructor.
-
inline explicit constexpr GeometryIdentifier(Value encoded)
Construct from an already encoded value.
- Parameters:
encoded – The encoded geometry identifier value
-
~GeometryIdentifier() = default
-
inline constexpr Value approach() const
Return the approach identifier.
- Returns:
The approach identifier component
-
inline constexpr Value boundary() const
Return the boundary identifier.
- Returns:
The boundary identifier component
-
inline constexpr Value extra() const
Return the extra identifier Usage can be experiment-specific, like tagging which kind of detector a surface object corresponds to, or which subsystem it belongs to.
- Returns:
The extra identifier component for experiment-specific use
-
inline constexpr Value layer() const
Return the layer identifier.
- Returns:
The layer identifier component
-
GeometryIdentifier &operator=(const GeometryIdentifier&) = default
Copy assignment operator.
- Returns:
Reference to this GeometryIdentifier after copying
-
GeometryIdentifier &operator=(GeometryIdentifier&&) = default
Move assignment operator.
- Returns:
Reference to this GeometryIdentifier after moving
-
inline constexpr Value passive() const
Return the passive identifier.
- Returns:
The passive identifier component (shares bit field with approach)
-
inline constexpr Value sensitive() const
Return the sensitive identifier.
- Returns:
The sensitive identifier component
-
inline constexpr Value value() const
Return the encoded value.
- Returns:
The full encoded 64-bit geometry identifier value
-
inline constexpr Value volume() const
Return the volume identifier.
- Returns:
The volume identifier component
-
inline constexpr GeometryIdentifier withApproach(Value approach) const
Return a new identifier with the approach set to
approach.- Parameters:
approach – the new approach identifier
- Returns:
a new identifier with the approach set to
approach
-
inline constexpr GeometryIdentifier withBoundary(Value boundary) const
Return a new identifier with the boundary set to
boundary.- Parameters:
boundary – the new boundary identifier
- Returns:
a new identifier with the boundary set to
boundary
-
inline constexpr GeometryIdentifier withExtra(Value extra) const
Return a new identifier with the extra set to
extra.- Parameters:
extra – the new extra identifier
- Returns:
a new identifier with the extra set to
extra
-
inline constexpr GeometryIdentifier withLayer(Value layer) const
Return a new identifier with the layer set to
layer.- Parameters:
layer – the new layer identifier
- Returns:
a new identifier with the layer set to
layer
-
inline constexpr GeometryIdentifier withPassive(Value passive) const
Return a new identifier with the passive set to
passive.- Parameters:
passive – the new passive identifier
- Returns:
a new identifier with the passive set to
passive
-
inline constexpr GeometryIdentifier withSensitive(Value sensitive) const
Return a new identifier with the sensitive set to
sensitive.- Parameters:
sensitive – the new sensitive identifier
- Returns:
a new identifier with the sensitive set to
sensitive
-
inline constexpr GeometryIdentifier withVolume(Value volume) const
Return a new identifier with the volume set to
volume.- Parameters:
volume – the new volume identifier
- Returns:
a new identifier with the volume set to
volume
Public Static Functions
-
static inline constexpr Value getMaxApproach()
Get the maximum value for the approach identifier.
- Returns:
the maximum value for the approach identifier
-
static inline constexpr Value getMaxBoundary()
Get the maximum value for the boundary identifier.
- Returns:
the maximum value for the boundary identifier
-
static inline constexpr Value getMaxExtra()
Get the maximum value for the extra identifier.
- Returns:
the maximum value for the extra identifier
-
static inline constexpr Value getMaxLayer()
Get the maximum value for the layer identifier.
- Returns:
the maximum value for the layer identifier
-
class GeometryObject
Base class to provide GeometryIdentifier interface:
simple set and get
It also provides the referencePosition method for Geometry geometrical object to be binned in BinnedArrays
Subclassed by Acts::Layer, Acts::Surface, Acts::Volume
Public Functions
-
GeometryObject() = default
Defaulted constructor.
-
inline explicit GeometryObject(const GeometryIdentifier &geometryId)
Constructor from a value.
- Parameters:
geometryId – the geometry identifier of the object
-
GeometryObject(const GeometryObject&) = default
Defaulted copy constructor.
-
virtual ~GeometryObject() noexcept = default
-
inline void assignGeometryId(const GeometryIdentifier &geometryId)
Set the value.
- Parameters:
geometryId – the geometry identifier to be assigned
-
inline GeometryIdentifier geometryId() const
- Returns:
the geometry id by reference
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const = 0
Force a binning position method.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the value for which the reference position is requested
- Returns:
vector 3D used for the binning schema
-
inline virtual double referencePositionValue(const GeometryContext &gctx, AxisDirection aDir) const
Implement the binningValue.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the dobule in which you want to bin
- Returns:
float to be used for the binning schema
Warning
doxygenclass: Cannot find class “Acts::Grid” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
class HomogeneousSurfaceMaterial : public Acts::ISurfaceMaterial
It extends the ISurfaceMaterial virtual base class to describe a simple homogeneous material on a surface.
Public Functions
-
HomogeneousSurfaceMaterial() = default
Default Constructor - defaulted.
-
HomogeneousSurfaceMaterial(const HomogeneousSurfaceMaterial &hsm) = default
Copy Constructor.
- Parameters:
hsm – is the source material
-
explicit HomogeneousSurfaceMaterial(const MaterialSlab &full, double splitFactor = 1., MappingType mappingType = MappingType::Default)
Explicit constructor.
- Parameters:
full – are the full material properties
splitFactor – is the split for pre/post update
mappingType – is the type of surface mapping associated to the surface
-
HomogeneousSurfaceMaterial(HomogeneousSurfaceMaterial &&hsm) = default
Copy Move Constructor.
- Parameters:
hsm – is the source material
-
~HomogeneousSurfaceMaterial() override = default
Destructor.
-
double factor(Direction pDir, MaterialUpdateMode mode) const
The inherited methods - for scale access.
- Parameters:
pDir – Direction through the surface
mode – Material update directive
- Returns:
The scaling factor for the material
-
virtual std::vector<AxisDirection> localAxisDirections() const final
Returns the axis directions for the local coordinate system.
- Returns:
Vector of axis directions defining the local coordinate system
-
const MaterialSlab &materialSlab(const Vector2 &lp) const = 0
Return method for full material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
MaterialSlab materialSlab(const Vector2 &lp, Direction pDir, MaterialUpdateMode mode) const
Return method for fully scaled material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
virtual const MaterialSlab &materialSlab(const Vector2 &lp = Vector2{0., 0.}) const final
Return method for full material description of the Surface.
from local coordinate of the material grid
Note
the input parameter is ignored
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
virtual const MaterialSlab &materialSlab(const Vector3 &gp) const final
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&) with a prior Surface::globalToLocal() call to convert the global position.
Note
the input parameter is ignored
- Parameters:
gp – is the global position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
const MaterialSlab &materialSlab(const Vector3 &gp) const = 0
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&) with a prior Surface::globalToLocal() call to convert the global position.
- Parameters:
gp – is the global position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
MaterialSlab materialSlab(const Vector3 &gp, Direction pDir, MaterialUpdateMode mode) const
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&, Direction, MaterialUpdateMode) with a prior Surface::globalToLocal() call to convert gp.
- Parameters:
gp – is the global position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
HomogeneousSurfaceMaterial &operator=(const HomogeneousSurfaceMaterial &hsm) = default
Assignment operator.
- Parameters:
hsm – is the source material
- Returns:
Reference to this material after assignment
-
HomogeneousSurfaceMaterial &operator=(HomogeneousSurfaceMaterial &&hsm) = default
Assignment Move operator.
- Parameters:
hsm – is the source material
- Returns:
Reference to this material after move assignment
-
virtual HomogeneousSurfaceMaterial &scale(double factor) final
Scale operator.
it is effectively a thickness scaling
- Parameters:
factor – is the scale factor
- Returns:
Reference to this scaled material
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – The outoput stream
- Returns:
Reference to the output stream for chaining
-
HomogeneousSurfaceMaterial() = default
-
class IAxis
Common base class for all Axis instance.
This allows generice handling such as for inspection.
Subclassed by Acts::Axis< AxisType::Equidistant, bdt >, Acts::Axis< AxisType::Variable, bdt >
Public Functions
-
IAxis() = default
-
inline explicit IAxis(std::optional<AxisDirection> direction)
Constructs a new axis with the given direction.
- Parameters:
direction – the optional direction of the axis
-
virtual ~IAxis() = default
-
virtual std::size_t getBin(double x) const = 0
Get corresponding bin index for given coordinate.
Note
Bin indices start at
1. The underflow bin has the index0while the indexnBins + 1indicates the overflow bin .- Parameters:
x – [in] input coordinate
- Returns:
index of bin containing the given value
-
virtual std::vector<double> getBinEdges() const = 0
Returns a vector of bin edges.
- Returns:
Vector which contains the bin edges
-
virtual AxisBoundaryType getBoundaryType() const = 0
Returns the boundary type set in the template param.
- Returns:
AxisBoundaryTypeof this axis
-
inline std::optional<AxisDirection> getDirection() const
Returns the direction of the axis.
- Returns:
AxisDirectionof this axis
-
virtual double getMax() const = 0
Get maximum of binning range.
- Returns:
maximum of binning range
-
virtual double getMin() const = 0
Get minimum of binning range.
- Returns:
minimum of binning range
-
virtual std::size_t getNBins() const = 0
Get total number of bins.
- Returns:
total number of bins (excluding under-/overflow bins)
-
virtual bool isEquidistant() const = 0
Returns whether the axis is equidistant.
- Returns:
bool is equidistant
-
virtual bool isVariable() const = 0
Returns whether the axis is variable.
- Returns:
bool is variable
-
template<typename callable_t>
inline decltype(auto) visit(const callable_t &callable) const Helper function that dispatches from the
IAxisbase class to a concrete axis type.It will call the provided
callablewith a const reference to the concrete axis type.- Template Parameters:
callable_t – the callable type
- Parameters:
callable – the callable object
- Returns:
the value returned by the callable
Public Static Functions
-
static std::unique_ptr<IAxis> createEquidistant(AxisBoundaryType aBoundaryType, double min, double max, std::size_t nbins, std::optional<AxisDirection> direction = std::nullopt)
Centralized axis factory for equidistant binning.
- Parameters:
aBoundaryType – the axis boundary type
min – the minimum edge of the axis
max – the maximum edge of the axis
nbins – the number of bins
direction – the optional direction of the axis
- Throws:
std::invalid_argument – if min >= max or nbins == 0
- Returns:
a unique pointer to the axis
-
static std::unique_ptr<IAxis> createVariable(AxisBoundaryType aBoundaryType, const std::vector<double> &edges, std::optional<AxisDirection> direction = std::nullopt)
Centralized axis factory for variable binning.
- Parameters:
aBoundaryType – the axis boundary type
edges – are the bin edges
direction – the optional direction of the axis
- Throws:
std::invalid_argument – if edges is empty or not strictly increasing
- Returns:
a unique pointer to the axis
-
IAxis() = default
-
class ISurfaceMaterial
Base class of all surface-based material description.
The class supplies references to MaterialSlab that are associated to a surface, extended by certain special representations (binned, homogeneous). The concrete MaterialSlab can depend on the local position on the surface.
Subclassed by Acts::BinnedSurfaceMaterial, Acts::HomogeneousSurfaceMaterial, Acts::IGridSurfaceMaterialBase, Acts::MergedMaterialMarker, Acts::ProtoSurfaceMaterialT< BinningType >
Public Functions
-
ISurfaceMaterial() = default
Constructor.
-
inline explicit ISurfaceMaterial(double splitFactor)
Constructor.
- Parameters:
splitFactor – is the splitting ratio between pre/post update
-
inline explicit ISurfaceMaterial(double splitFactor, MappingType mappingType)
Constructor.
- Parameters:
splitFactor – is the splitting ratio between pre/post update
mappingType – is the type of surface mapping associated to the surface
-
virtual ~ISurfaceMaterial() = default
Destructor.
-
double factor(Direction pDir, MaterialUpdateMode mode) const
Update pre factor.
- Parameters:
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
Factor for material scaling based on direction and update mode
-
virtual std::vector<AxisDirection> localAxisDirections() const = 0
Returns the axis directions for the local coordinate system.
- Returns:
Vector of axis directions defining the local coordinate system
-
inline MappingType mappingType() const
Return the type of surface material mapping.
- Returns:
The mapping type indicating how material is associated with the surface
-
virtual const MaterialSlab &materialSlab(const Vector2 &lp) const = 0
Return method for full material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
virtual MaterialSlab materialSlab(const Vector2 &lp, Direction pDir, MaterialUpdateMode mode) const
Return method for fully scaled material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
virtual const MaterialSlab &materialSlab(const Vector3 &gp) const = 0
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&) with a prior Surface::globalToLocal() call to convert the global position.
- Parameters:
gp – is the global position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
virtual MaterialSlab materialSlab(const Vector3 &gp, Direction pDir, MaterialUpdateMode mode) const
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&, Direction, MaterialUpdateMode) with a prior Surface::globalToLocal() call to convert gp.
- Parameters:
gp – is the global position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
virtual ISurfaceMaterial &scale(double factor) = 0
Scale material.
- Parameters:
factor – is the scale factor applied
- Returns:
Reference to this material object for chaining
-
virtual std::ostream &toStream(std::ostream &sl) const = 0
Output Method for std::ostream, to be overloaded by child classes.
- Parameters:
sl – Output stream to write to
- Returns:
Reference to the output stream for chaining
-
inline std::string toString() const
output into a string
- Returns:
the string representation
Friends
-
inline friend std::ostream &operator<<(std::ostream &out, const ISurfaceMaterial &sm)
output stream operator
Prints information about this object to the output stream using the virtual ISurfaceMaterial::toStream method
- Returns:
modified output stream object
-
ISurfaceMaterial() = default
-
class InfiniteBounds : public Acts::SurfaceBounds
templated boundless extension to forward the interface Returns all inside checks to true and can templated for all bounds
Public Functions
-
inline virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
inline virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
inline virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
- Returns:
Vector2 representing the center position in local coordinates
-
inline virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
inline virtual bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const final
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
inline virtual std::ostream &toStream(std::ostream &os) const final
Output Method for std::ostream.
- Parameters:
os – Output stream to write to
- Returns:
Reference to the output stream for method chaining
-
inline virtual SurfaceBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
inline virtual std::vector<double> values() const final
Access method for bound values, this is a dynamically sized vector containing the parameters needed to describe these bounds.
- Returns:
of the stored values for this SurfaceBounds object
-
inline virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
-
template<typename grid_t>
class InterpolatedBFieldMap : public Acts::InterpolatedMagneticField Interpolates magnetic field value from field values on a given grid.
This class implements a magnetic field service which is initialized by a field map defined by:
a list of field values on a regular grid in some n-dimensional space,
a transformation of global 3D coordinates onto this n-dimensional space.
a transformation of local n-Dimensional magnetic field coordinates into global (cartesian) 3D coordinates
The magnetic field value for a given global position is then determined by:
mapping the position onto the grid,
looking up the magnetic field values on the closest grid points,
doing a linear interpolation of these magnetic field values.
Internally, this class uses a field interpolation cell to speed up lookups. This cell contains the interpolation points so the grid does not have to be consulted for each lookup. Explicit methods to create such a field cell are provided, but field cell creation is automatically handled by Acts::InterpolatedBFieldMap::makeCache, opaque to the client.
This class can leverage spatial symmetries in the magnetic field distribution. For cylindrically symmetric fields (e.g., solenoids, toroids), a 2D rz map can be used instead of a full 3D xyz map, significantly reducing memory requirements and improving performance. Helper functions Acts::fieldMapRZ and Acts::fieldMapXYZ are provided to construct field maps with the appropriate symmetries.
- Template Parameters:
grid_t – The Grid type which provides the field storage and interpolation
Public Types
Public Functions
-
inline explicit InterpolatedBFieldMap(Config cfg)
default constructor
- Parameters:
cfg – Configuration containing grid and scaling factor
-
inline Result<Vector3> getField(const Vector3 &position) const
retrieve field at given position
- Parameters:
position – [in] global 3D position
- Returns:
magnetic field value at the given position
- Pre:
The given
positionmust lie within the range of the underlying magnetic field map.
-
inline virtual Result<Vector3> getField(const Vector3 &position, MagneticFieldProvider::Cache &cache) const final
Retrieve magnetic field value at a given location.
Requires an instance of Acts::MagneticFieldProvider::Cache created through makeCache.
- Parameters:
position – [in] global 3D position for the lookup
cache – [inout] Field provider specific cache object
- Returns:
magnetic field vector at given position
-
inline Result<FieldCell> getFieldCell(const Vector3 &position) const
retrieve field cell for given position
- Parameters:
position – [in] global 3D position
- Returns:
field cell containing the given global position
- Pre:
The given
positionmust lie within the range of the underlying magnetic field map.
-
inline virtual Vector3 getFieldUnchecked(const Vector3 &position) const final
Get magnetic field value without bounds checking (faster).
Warning
No bounds checking is performed. The caller must ensure the position is within the valid range of the field map.
- Parameters:
position – Global 3D position for the lookup
- Returns:
Magnetic field value at the given position
-
inline const Grid &getGrid() const
Get a const reference on the underlying grid structure.
- Returns:
grid reference
-
inline virtual std::vector<double> getMax() const final
get the maximum value of all axes of the field map
- Returns:
vector returning the maxima of all field map axes
-
inline virtual std::vector<double> getMin() const final
get the minimum value of all axes of the field map
- Returns:
vector returning the minima of all field map axes
-
inline virtual std::vector<std::size_t> getNBins() const final
get the number of bins for all axes of the field map
- Returns:
vector returning number of bins for all field map axes
-
inline virtual bool isInside(const Vector3 &position) const final
check whether given 3D position is inside look-up domain
- Parameters:
position – [in] global 3D position
- Returns:
trueif position is inside the defined look-up grid, otherwisefalse
-
inline bool isInsideLocal(const Vector<DIM_POS> &gridPosition) const
check whether given 3D position is inside look-up domain
- Parameters:
gridPosition – [in] local N-D position
- Returns:
trueif position is inside the defined look-up grid, otherwisefalse
-
inline virtual MagneticFieldProvider::Cache makeCache(const MagneticFieldContext &mctx) const final
Make an opaque cache for the magnetic field.
Instructs the specific implementation to generate a Acts::MagneticFieldProvider::Cache instance for magnetic field lookup.
- Parameters:
mctx – The magnetic field context to generate cache for
- Returns:
Cache The opaque cache object
Public Static Attributes
-
struct Cache
Cache for field cell to improve performance of field lookups.
This cache stores the current field cell which contains the interpolation data for a confined region of space. By caching the cell, subsequent lookups at nearby positions (e.g., during track propagation) can avoid expensive grid queries. The cache automatically updates when a position outside the current cell is queried.
Public Functions
-
inline explicit Cache(const MagneticFieldContext&)
Constructor with magnetic field context.
-
inline explicit Cache(const MagneticFieldContext&)
-
struct Config
Config structure for the interpolated B field map.
Public Members
-
double scale = 1.
global B-field scaling factor
Note
Negative values for
scaleare accepted and will invert the direction of the magnetic field.
-
std::function<Vector3(const FieldType&, const Vector3&)> transformBField
calculating the global 3D coordinates (cartesian) of the magnetic field with the local n dimensional field and the global 3D position as input
- std::function< Vector< DIM_POS >const Vector3 &)> transformPos
mapping of global 3D coordinates (cartesian) onto grid space
-
double scale = 1.
-
struct FieldCell
struct representing smallest grid unit in magnetic field grid
This type encapsulates all required information to perform linear interpolation of magnetic field values within a confined spatial region (hyper-box). The cell stores field values at all corner points and performs interpolation for any position within the cell boundaries. This allows for efficient repeated lookups within the same grid cell without consulting the full grid structure.
Public Functions
-
inline FieldCell(std::array<double, DIM_POS> lowerLeft, std::array<double, DIM_POS> upperRight, std::array<Vector3, N> fieldValues)
default constructor
- Parameters:
lowerLeft – [in] generalized lower-left corner of hyper box (containing the minima of the hyper box along each Dimension)
upperRight – [in] generalized upper-right corner of hyper box (containing the maxima of the hyper box along each Dimension)
fieldValues – [in] field values at the hyper box corners sorted in the canonical order defined in Acts::interpolate
-
inline FieldCell(std::array<double, DIM_POS> lowerLeft, std::array<double, DIM_POS> upperRight, std::array<Vector3, N> fieldValues)
-
class InterpolatedMagneticField : public Acts::MagneticFieldProvider
Base class for interpolated magnetic field providers.
This class can be used for non-trivial magnetic field implementations.
The key idea here is to calculate an interpolated value of the magnetic field from a grid of known field values. In 3D, this means the interpolation is done from the 8 corner points of a field cell. The field cell can be retrieved for any given position. Since during typical access patterns, e.g. the propagation, subsequent steps are relatively likely to not cross the field cell boundary, the field cell can be cached.

Subclassed by Acts::InterpolatedBFieldMap< grid_t >
Public Functions
-
virtual Vector3 getFieldUnchecked(const Vector3 &position) const = 0
Get a field value without checking if the lookup position is within the interpolation domain.
- Parameters:
position – The lookup position in 3D
- Returns:
The field value at
position
-
virtual std::vector<double> getMax() const = 0
get the maximum value of all axes of the field map
- Returns:
vector returning the maxima of all field map axes
-
virtual std::vector<double> getMin() const = 0
get the minimum value of all axes of the field map
- Returns:
vector returning the minima of all field map axes
-
virtual std::vector<std::size_t> getNBins() const = 0
get the number of bins for all axes of the field map
- Returns:
vector returning number of bins for all field map axes
-
virtual Vector3 getFieldUnchecked(const Vector3 &position) const = 0
-
class JsonDetectorElement : public Acts::SurfacePlacementBase
A implementation of a detector element, that is constructed from a JSON description of a surface.
The idea behind this is that it helps importing whole tracking geometries from JSON files. In some parts of the codebase, the existence of a detector element associated to a surface has a specific meaning (e.g., flags surfaces as sensitive).
Public Functions
-
JsonDetectorElement(const nlohmann::json &jSurface, double thickness)
Constructor from JSON surface description.
- Parameters:
jSurface – JSON object describing the surface
thickness – Thickness of the detector element
-
inline virtual bool isSensitive() const override
Returns whether the placement corresponds to a surface on which the measurements from the experiment are represented, i.e.
it is
- Returns:
True if this is a sensitive surface
-
virtual const Transform3 &localToGlobalTransform(const GeometryContext &gctx) const override
Return the transform for this detector element.
- Parameters:
gctx – Geometry context (unused for this implementation)
- Returns:
Transform matrix for this detector element
-
virtual const Surface &surface() const override
Return const reference to the surface.
- Returns:
Const reference to the associated surface
-
virtual Surface &surface() override
Return mutable reference to the surface.
- Returns:
Mutable reference to the associated surface
-
double thickness() const
Return the thickness of the detector element.
- Returns:
Thickness value
-
JsonDetectorElement(const nlohmann::json &jSurface, double thickness)
-
template<typename propagator_t, typename traj_t>
class KalmanFitter Kalman fitter implementation.
The Kalman filter contains an Actor and a Sequencer sub-class. The Sequencer has to be part of the Navigator of the Propagator in order to initialize and provide the measurement surfaces.
The Actor is part of the Propagation call and does the Kalman update and eventually the smoothing. Updater, Smoother and Calibrator are given to the Actor for further use:
The Updater is the implemented kalman updater formalism, it runs via a visitor pattern through the measurements.
The Smoother is called at the end of the filtering by the Actor.
Measurements are not required to be ordered for the KalmanFilter, measurement ordering needs to be figured out by the navigation of the propagator.
The void components are provided mainly for unit testing.
- Template Parameters:
propagator_t – Type of the propagation class, usually an instance of Acts::Propagator
Public Functions
-
inline explicit KalmanFitter(propagator_t pPropagator, std::unique_ptr<const Logger> _logger = getDefaultLogger("KalmanFitter", Logging::INFO))
Constructor with propagator and logger.
- Parameters:
pPropagator – Propagator instance for track propagation
_logger – Logger for diagnostic output
Fit implementation of the forward filter, calls the the filter and smoother/reversed filter.
Note
The input measurements are given in the form of
SourceLinks. It’scalibrator_t'sjob to turn them into calibrated measurements used in the fit.- Template Parameters:
source_link_iterator_t – Iterator type used to pass source links
track_container_t – Type of the track container
- Parameters:
it – Begin iterator for the fittable uncalibrated measurements
end – End iterator for the fittable uncalibrated measurements
sParameters – The initial track parameters
kfOptions – KalmanOptions steering the fit
sSequence – surface sequence used to initialize a DirectNavigator
trackContainer – Input track container storage to append into
- Returns:
the output as an output track
-
template<typename source_link_iterator_t, TrackContainerFrontend track_container_t>
inline Result<typename track_container_t::TrackProxy> fit(source_link_iterator_t it, source_link_iterator_t end, const BoundTrackParameters &sParameters, const KalmanFitterOptions<traj_t> &kfOptions, track_container_t &trackContainer) const Fit implementation of the forward filter, calls the the filter and smoother/reversed filter.
Note
The input measurements are given in the form of
SourceLinks. It’s the calibrators job to turn them into calibrated measurements used in the fit.- Template Parameters:
source_link_iterator_t – Iterator type used to pass source links
track_container_t – Type of the track container
- Parameters:
it – Begin iterator for the fittable uncalibrated measurements
end – End iterator for the fittable uncalibrated measurements
sParameters – The initial track parameters
kfOptions – KalmanOptions steering the fit
trackContainer – Input track container storage to append into
- Returns:
the output as an output track
-
class Layer : public virtual Acts::GeometryObject
Base Class for a Detector Layer in the Tracking Geometry.
An actual implemented Detector Layer inheriting from this base class has to inherit from a specific type of Surface as well. In addition, a Layer can carry:
A SurfaceArray of Surfaces holding the actual detector elements or subSurfaces. A pointer to the TrackingVolume (can only be set by such) An active/passive code : 0 - active 1 - passive [….] - other
The search type for compatible surfaces on a layer is [ the higher the number, the faster ]: ——— Layer internal ———————————————— -1 - provide all intersection tested without boundary check 0 - provide all intersection tested with boundary check 1 - provide overlap descriptor based without boundary check 2 - provide overlap descriptor based with boundary check
A layer can have substructure regarding:
m_ssRepresentingSurface -> always exists (1), can have material (2)
m_ssSensitiveSurfaces -> can or not exist (0,1), can have material (2)
m_ssApproachSurfaces -> can or not exist (0,1) cam have material (2)
Subclassed by Acts::ConeLayer, Acts::CylinderLayer, Acts::DiscLayer, Acts::NavigationLayer, Acts::PlaneLayer
Public Functions
-
~Layer() noexcept override
Destructor.
-
ApproachDescriptor *approachDescriptor()
Non-const version of the approach descriptor.
- Returns:
Mutable pointer to the approach descriptor
-
const ApproachDescriptor *approachDescriptor() const
Return method for the approach descriptor, can be nullptr.
- Returns:
Pointer to the approach descriptor, or nullptr if not set
Decompose Layer into (compatible) surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – Position parameter for searching
direction – Direction of the parameters for searching
options – The navigation options
- Returns:
list of intersection of surfaces on the layer
-
virtual bool isOnLayer(const GeometryContext &gctx, const Vector3 &position, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::None()) const
geometrical isOnLayer() method
Note
using isOnSurface() with Layer specific tolerance
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be checked
boundaryTolerance – is the boundary check directive
- Returns:
boolean that indicates success of the operation
-
double layerThickness() const
Return the Thickness of the Layer this is by definition along the normal vector of the surfaceRepresentation.
- Returns:
The layer thickness value
-
LayerType layerType() const
return the LayerType
- Returns:
The layer type (active, passive, or navigation)
-
const Layer *nextLayer(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Fast navigation to next layer.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the start position for the search
direction – is the direction for the search
- Returns:
the pointer to the next layer
-
const Volume *representingVolume() const
Return the abstract volume that represents the layer.
- Returns:
the representing volume of the layer
-
virtual bool resolve(bool resolveSensitive, bool resolveMaterial, bool resolvePassive) const
Accept layer according to the following collection directives.
- Parameters:
resolveSensitive – is the prescription to find the sensitive surfaces
resolveMaterial – is the precription to find material surfaces
resolvePassive – is the prescription to find all passive surfaces
- Returns:
a boolean whether the layer is accepted for processing
-
template<typename options_t>
inline bool resolve(const options_t &options) const Accept layer according to the following collection directives.
- Template Parameters:
options_t – Type of the options for navigation
- Parameters:
options – Navigation options containing resolution settings
- Returns:
a boolean whether the layer is accepted for processing
-
SurfaceArray *surfaceArray()
Non-const version.
- Returns:
Mutable pointer to the surface array
-
const SurfaceArray *surfaceArray() const
Return the entire SurfaceArray, returns a nullptr if no SurfaceArray.
- Returns:
Pointer to the surface array, or nullptr if not set
Surface seen on approach for layers without sub structure, this is the surfaceRepresentation for layers with sub structure, this is the approachSurface.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – Position for searching
direction – Direction for searching
options – The navigation options
- Returns:
the Surface intersection of the approach surface
-
virtual const Surface &surfaceRepresentation() const = 0
Transforms the layer into a Surface representation for extrapolation.
Note
the layer can be hosting many surfaces, but this is the global one to which one can extrapolate
- Returns:
Reference to the layer’s surface representation
-
virtual Surface &surfaceRepresentation() = 0
Non-const version of surface representation access.
- Returns:
Mutable reference to the layer surface
-
const TrackingVolume *trackingVolume() const
Get the confining TrackingVolume.
- Returns:
the pointer to the enclosing volume
-
class LineBounds : public Acts::SurfaceBounds
Bounds for a LineSurface.
Public Types
Public Functions
-
inline explicit LineBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from fixed size array.
- Parameters:
values – The bound values stored in a fixed size array
-
inline explicit LineBounds(double r, double halfZ) noexcept(false)
Constructor.
- Parameters:
r – The radius of the line
halfZ – The half length in z
-
inline virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
inline virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For LineBounds: returns (0,0) since bounds are symmetric around origin
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The bound value for the specified parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – is the ostream to be dumped into
- Returns:
Reference to the output stream for method chaining
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
inline explicit LineBounds(const std::array<double, eSize> &values) noexcept(false)
-
class LineSurface : public Acts::Surface
Base class for a linear surfaces in the TrackingGeometry to describe dirft tube, straw like detectors or the Perigee It inherits from Surface.
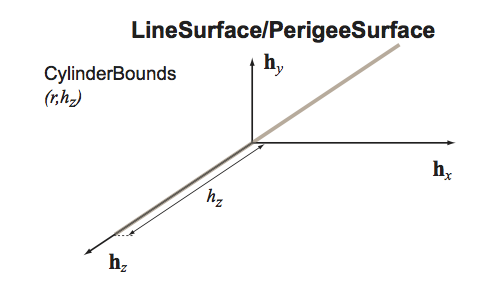
Note
It leaves the type() method virtual, so it can not be instantiated
Subclassed by Acts::PerigeeSurface, Acts::StrawSurface
Public Functions
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the derivative of path length at the geometry constraint or point-of-closest-approach w.r.t.
alignment parameters of the surface (i.e. local frame origin in global 3D Cartesian coordinates and its rotation represented with extrinsic Euler angles)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Derivative of path length w.r.t. the alignment parameters
Overwrite the existing surface bounds with new ones.
- Parameters:
newBounds – Pointer to the new bounds
-
virtual const SurfaceBounds &bounds() const final
This method returns the bounds of the surface by reference.
- Returns:
Reference to the surface bounds
-
const std::shared_ptr<const LineBounds> &boundsPtr() const
This method returns the shared_ptr to the LineBounds.
- Returns:
Shared pointer to the line bounds
-
virtual BoundToFreeMatrix boundToFreeJacobian(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the jacobian from local to global which the surface knows best, hence the calculation is done here.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Jacobian from local to global
-
virtual FreeToPathMatrix freeToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Calculate the derivative of path length at the geometry constraint or point-of-closest-approach w.r.t.
free parameters
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Derivative of path length w.r.t. free parameters
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
Specified for
LineSurface: global to local method without dynamic memory allocation.This method is the true global -> local transformation. It makes use of
globalToLocaland indicates the sign of theActs::eBoundLoc0by the given momentum direction.The calculation of the sign of the radius (or \( d_0 \)) can be done as follows: May \( \vec d = \vec m - \vec c \) denote the difference between the center of the line and the global position of the measurement/predicted state. Then, \( \vec d \) lies in the so-called measurement plane. The latter is determined by the two orthogonal vectors \( \vec{\texttt{measY}} = \vec{e}_z \) and \( \vec{\texttt{measX}} = \vec{\texttt{measY}} \times \frac{\vec{p}}{|\vec{p}|} \).
The sign of the radius (or \( d_{0} \) ) is then defined by the projection of \( \vec{d} \) on \( \vec{measX} \):\( sign = -sign(\vec{d} \cdot \vec{measX}) \)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
direction – global 3D momentum direction (optionally ignored)
tolerance – (unused)
- Returns:
A
Result<Vector2>, which is set to!ok()if thepositionis not the point of closest approach to the line surface.
-
virtual MultiIntersection3D intersect(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::Infinite(), double tolerance = s_onSurfaceTolerance) const final
Calculate the straight-line intersection with the line surface.
Mathematical motivation:
Given two lines in parametric form:
\( \vec l_{a}(u) = \vec m_a + u \cdot \vec e_{a} \)
\( \vec l_{b}(\mu) = \vec m_b + \mu \cdot \vec e_{b} \)
The vector between any two points on the two lines is given by:
\( \vec s(u, \mu) = \vec l_{b} - l_{a} = \vec m_{ab} + \mu \cdot \vec e_{b} - u \cdot \vec e_{a} \),
where \( \vec m_{ab} = \vec m_{b} - \vec m_{a} \).
\( \vec s(u_0, \mu_0) \) denotes the vector between the two closest points
\( \vec l_{a,0} = l_{a}(u_0) \) and \( \vec l_{b,0} = l_{b}(\mu_0) \)
and is perpendicular to both, \( \vec e_{a} \) and \( \vec e_{b} \).
This results in a system of two linear equations:
(i) \( 0 = \vec s(u_0, \mu_0) \cdot \vec e_a = \vec m_{ab} \cdot \vec e_a + \mu_0 \vec e_a \cdot \vec e_b - u_0 \)
(ii) \( 0 = \vec s(u_0, \mu_0) \cdot \vec e_b = \vec m_{ab} \cdot \vec e_b + \mu_0 - u_0 \vec e_b \cdot \vec e_a \)
Solving (i) and (ii) for \( u \) and \( \mu_0 \) yields:
\( u_0 = \frac{(\vec m_{ab} \cdot \vec e_a)-(\vec m_{ab} \cdot \vec e_b)(\vec e_a \cdot \vec e_b)}{1-(\vec e_a \cdot \vec e_b)^2} \)
\( \mu_0 = - \frac{(\vec m_{ab} \cdot \vec e_b)-(\vec m_{ab} \cdot \vec e_a)(\vec e_a \cdot \vec e_b)}{1-(\vec e_a \cdot \vec e_b)^2} \)
The function checks if \( u_0 \simeq 0\) to check if the current
positionis at the point of closest approach, i.e. the intersection point, in which case it will return anonSuraceintersection result. Otherwise, the path length frompositionto the point of closest approach ( \( u_0 \)) is returned in areachableintersection.Note
expected to be normalized
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The global position as a starting point
direction – The global direction at the starting point
boundaryTolerance – The boundary check directive for the estimate
tolerance – the tolerance used for the intersection
- Returns:
is the intersection object
-
Vector3 lineDirection(const GeometryContext &gctx) const
Get the line direction in global coordinates.
- Parameters:
gctx – The geometry context
- Returns:
The direction vector of the line surface
-
virtual Matrix<2, 3> localCartesianToBoundLocalDerivative(const GeometryContext &gctx, const Vector3 &position) const final
Calculate the derivative of bound track parameters local position w.r.t.
position in local 3D Cartesian coordinates
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position of the parameters in global
- Returns:
Derivative of bound local position w.r.t. position in local 3D cartesian coordinates
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const final
Local to global transformation.
Note
for line surfaces the momentum direction is used in order to interpret the drift radius
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position to be transformed
direction – is the global momentum direction (used to sign the closest approach)
- Returns:
global position by value
-
virtual std::string name() const override
Return properly formatted class name for screen output.
- Returns:
String representation of the class name
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const override
Return the surface normal at a given
positionanddirection.This method is fully generic, and valid for all surface types.
Note
For some surface types, the
directionis ignored, but it is not safe to pass in a zero vector!- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – The position at which to calculate the normal
direction – The direction at which to calculate the normal
- Returns:
The normal vector at the given position and direction
-
LineSurface &operator=(const LineSurface &other)
Assignment operator.
- Parameters:
other – is the source surface dor copying
- Returns:
Reference to this LineSurface after assignment
-
virtual double pathCorrection(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const override
the pathCorrection for derived classes with thickness is by definition 1 for LineSurfaces
Note
input parameters are ignored
Note
there’s no material associated to the line surface
- Parameters:
gctx – Geometry context (ignored)
position – Position parameter (ignored)
direction – Direction parameter (ignored)
- Returns:
Always returns 1.0 for line surfaces
-
virtual RotationMatrix3 referenceFrame(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Return the measurement frame - this is needed for alignment, in particular.
for StraightLine and Perigee Surface
the default implementation is the RotationMatrix3 of the transform
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position where the measurement frame is constructed
direction – is the momentum direction used for the measurement frame construction
- Returns:
is a rotation matrix that indicates the measurement frame
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const final
The binning position is the position calculated for a certain binning type.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the axis direction for the reference position request
- Returns:
position that can beused for this binning
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
-
class Logger
class for printing debug output
This class provides the user interface for printing debug messages with different levels of severity.
Public Functions
-
inline Logger(std::unique_ptr<Logging::OutputPrintPolicy> pPrint, std::unique_ptr<Logging::OutputFilterPolicy> pFilter)
construct from output print and filter policy
- Parameters:
pPrint – [in] policy for printing debug messages
pFilter – [in] policy for filtering debug messages
-
inline std::unique_ptr<Logger> clone(const std::optional<std::string> &_name = std::nullopt, const std::optional<Logging::Level> &_level = std::nullopt) const
Make a copy of this logger, optionally changing the name or the level.
- Parameters:
_name – the optional new name
_level – the optional new level
- Returns:
Unique pointer to a cloned logger
-
inline std::unique_ptr<Logger> clone(Logging::Level _level) const
Make a copy of the logger, with a new level.
Convenience function for if you only want to change the level but not the name.
- Parameters:
_level – the new level
- Returns:
the new logger
-
inline std::unique_ptr<Logger> cloneWithSuffix(const std::string &suffix, std::optional<Logging::Level> _level = std::nullopt) const
Make a copy of the logger, with a suffix added to the end of it’s name.
You can also optionally supply a new level
- Parameters:
suffix – the suffix to add to the end of the name
_level – the optional new level
- Returns:
Unique pointer to a cloned logger with modified name
-
inline bool doPrint(const Logging::Level &lvl) const
decide whether a message with a given debug level has to be printed
- Parameters:
lvl – [in] debug level of debug message
- Returns:
trueif debug message should be printed, otherwisefalse
-
inline const Logging::OutputFilterPolicy &filterPolicy() const
Return the filter policy for this logger.
- Returns:
the filter policy
-
inline Logging::Level level() const
Return the level of the filter policy of this logger.
- Returns:
the level
-
inline void log(const Logging::Level &lvl, const std::string &input) const
log a debug message
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline const std::string &name() const
Return the name of the print policy of this logger.
- Returns:
the name
-
inline const Logger &operator()() const
Helper function so a logger reference can be used as is with the logging macros.
- Returns:
Reference to this logger
-
inline const Logging::OutputPrintPolicy &printPolicy() const
Return the print policy for this logger.
- Returns:
the print policy
-
inline Logger(std::unique_ptr<Logging::OutputPrintPolicy> pPrint, std::unique_ptr<Logging::OutputFilterPolicy> pFilter)
-
class DefaultFilterPolicy : public Acts::Logging::OutputFilterPolicy
default filter policy for debug messages
All debug messages with a debug level equal or larger to the specified threshold level are processed.
Public Functions
-
inline explicit DefaultFilterPolicy(Level lvl)
constructor
- Parameters:
lvl – [in] threshold debug level
-
~DefaultFilterPolicy() override = default
virtual default destructor
-
inline virtual std::unique_ptr<OutputFilterPolicy> clone(Level level) const override
Make a copy of this filter policy with a new level.
- Parameters:
level – the new level
- Returns:
the new copy
-
inline explicit DefaultFilterPolicy(Level lvl)
-
class DefaultPrintPolicy : public Acts::Logging::OutputPrintPolicy
default print policy for debug messages
This class allows to print debug messages without further modifications to a specified output stream.
Public Functions
-
inline explicit DefaultPrintPolicy(std::ostream *out = &std::cout)
constructor
- Parameters:
out – [in] pointer to output stream object
- Pre:
outis non-zero
-
inline virtual std::unique_ptr<OutputPrintPolicy> clone(const std::string&) const override
Make a copy of this print policy with a new name.
- Returns:
the copy
-
inline virtual void flush(const Level &lvl, const std::string &input) final
flush the debug message to the destination stream
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline virtual const std::string &name() const override
Fulfill
OutputPrintPolicyinterface.This policy doesn’t actually have a name, so the assumption is that somewhere in the decorator hierarchy, there is something that returns a name without delegating to a wrappee, before reaching this overload.
Note
This method will throw an exception
- Returns:
the name, but it never returns
-
inline explicit DefaultPrintPolicy(std::ostream *out = &std::cout)
-
class LevelOutputDecorator : public Acts::Logging::OutputDecorator
decorate debug message with its debug level
The debug message is complemented with its debug level.
Public Functions
-
inline explicit LevelOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee)
constructor
- Parameters:
wrappee – [in] output print policy object to be wrapped
-
inline virtual std::unique_ptr<OutputPrintPolicy> clone(const std::string &name) const override
Make a copy of this print policy with a new name.
- Parameters:
name – the new name
- Returns:
the copy
-
inline virtual void flush(const Level &lvl, const std::string &input) override
flush the debug message to the destination stream
This function prepends the debug level to the debug message and then delegates the flushing of the whole message to its wrapped object.
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline explicit LevelOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee)
-
class NamedOutputDecorator : public Acts::Logging::OutputDecorator
decorate debug message with a name
The debug message is complemented with a name.
Public Functions
-
inline NamedOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee, const std::string &name, unsigned int maxWidth = 15)
constructor
- Parameters:
wrappee – [in] output print policy object to be wrapped
name – [in] name to be added to debug message
maxWidth – [in] maximum width of field used for name
-
inline virtual std::unique_ptr<OutputPrintPolicy> clone(const std::string &name) const override
Make a copy of this print policy with a new name.
- Parameters:
name – the new name
- Returns:
the copy
-
inline virtual void flush(const Level &lvl, const std::string &input) override
flush the debug message to the destination stream
This function prepends the given name to the debug message and then delegates the flushing of the whole message to its wrapped object.
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline virtual const std::string &name() const override
Get this named output decorators name.
- Returns:
the name
-
inline NamedOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee, const std::string &name, unsigned int maxWidth = 15)
-
class OutputDecorator : public Acts::Logging::OutputPrintPolicy
base class for decorating the debug output
Derived classes may augment the debug message with additional information. Chaining different decorators is possible to customize the output to your needs.
Subclassed by Acts::Logging::LevelOutputDecorator, Acts::Logging::NamedOutputDecorator, Acts::Logging::ThreadOutputDecorator, Acts::Logging::TimedOutputDecorator
Public Functions
-
inline explicit OutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee)
constructor wrapping actual output print policy
- Parameters:
wrappee – [in] output print policy object which is wrapped by this decorator object
-
inline virtual void flush(const Level &lvl, const std::string &input) override
flush the debug message to the destination stream
This function delegates the flushing of the debug message to its wrapped object.
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline virtual const std::string &name() const override
Return the name of the output decorator (forwards to wrappee)
- Returns:
the name
-
inline explicit OutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee)
-
class OutputFilterPolicy
abstract base class for filtering debug output
Implementations of this interface need to define whether a debug message with a certain debug level is processed or filtered out.
Subclassed by Acts::Logging::DefaultFilterPolicy
Public Functions
-
virtual ~OutputFilterPolicy() = default
virtual default destructor
-
virtual std::unique_ptr<OutputFilterPolicy> clone(Level level) const = 0
Make a copy of this filter policy with a new level.
- Parameters:
level – the new level
- Returns:
the new copy
-
virtual ~OutputFilterPolicy() = default
-
class OutputPrintPolicy
abstract base class for printing debug output
Implementations of this interface need to define how and where to print debug messages (e.g. to a file, to a stream into a database etc).
Subclassed by Acts::Logging::DefaultPrintPolicy, Acts::Logging::OutputDecorator
Public Functions
-
virtual ~OutputPrintPolicy() = default
virtual default destructor
-
virtual std::unique_ptr<OutputPrintPolicy> clone(const std::string &name) const = 0
Make a copy of this print policy with a new name.
- Parameters:
name – the new name
- Returns:
the copy
-
virtual void flush(const Level &lvl, const std::string &input) = 0
handle output of debug message
- Parameters:
lvl – [in] debug output level of message
input – [in] text of debug message
-
virtual const std::string &name() const = 0
Return the name of the print policy.
- Returns:
the name
-
virtual ~OutputPrintPolicy() = default
-
class ThreadOutputDecorator : public Acts::Logging::OutputDecorator
decorate debug message with a thread ID
The debug message is complemented with a thread ID.
Public Functions
-
inline explicit ThreadOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee)
constructor
- Parameters:
wrappee – [in] output print policy object to be wrapped
-
inline virtual std::unique_ptr<OutputPrintPolicy> clone(const std::string &name) const override
Make a copy of this print policy with a new name.
- Parameters:
name – the new name
- Returns:
the copy
-
inline virtual void flush(const Level &lvl, const std::string &input) override
flush the debug message to the destination stream
This function prepends the thread ID to the debug message and then delegates the flushing of the whole message to its wrapped object.
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline explicit ThreadOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee)
-
class ThresholdFailure : public std::runtime_error
Custom exception class so threshold failures can be caught.
-
class TimedOutputDecorator : public Acts::Logging::OutputDecorator
decorate debug message with a time stamp
The debug message is complemented with a time stamp.
Public Functions
-
inline explicit TimedOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee, const std::string &format = "%X")
constructor
- Parameters:
wrappee – [in] output print policy object to be wrapped
format – [in] format of time stamp (see std::strftime)
-
inline virtual std::unique_ptr<OutputPrintPolicy> clone(const std::string &name) const override
Make a copy of this print policy with a new name.
- Parameters:
name – the new name
- Returns:
the copy
-
inline virtual void flush(const Level &lvl, const std::string &input) override
flush the debug message to the destination stream
This function prepends a time stamp to the debug message and then delegates the flushing of the whole message to its wrapped object.
- Parameters:
lvl – [in] debug level of debug message
input – [in] text of debug message
-
inline explicit TimedOutputDecorator(std::unique_ptr<OutputPrintPolicy> wrappee, const std::string &format = "%X")
-
class MagneticFieldContext : public ContextType
Context object for lookup of magnetic field values.
The magnetic field context is an opaque type which contains experiment specific event context information. This can be used to supply event dependent data to the magnetic field instance, in case it is needed to provide correct field values. The library itself does not make any assumptions on the content of this context type (it is implemented using
std::any), but passes a reference through the call-chain to the field implementation. An experiment specific field implementation is then expected to performa cast to the concrete type, and use the contents.An example use case of the context could be to look up conditions data / records for the value of the magnetic field at the time of the event.
-
class MagneticFieldProvider
Base class for all magnetic field providers.
All magnetic field implementations inherit and implement from this interface.
It provides a generic interface over different implementations. To speed up magnetic field lookup, each implementation can have a cache object. The cache object can for example be used to store a local interpolation domain, to speed up nearby field lookups. The client is expected to pass into lookup calls an instance of Acts::MagneticFieldProvider::Cache.
The implementation is then free to use and update this cache instance as needed. Before a client can issue field lookup calls, it needs to obtain an initialized instance of this cache object. This can be achieved generically for all implementations by using Acts::MagneticFieldProvider::makeCache. This function accepts an instance of Acts::MagneticFieldContext.
The main lookup method of Acts::MagneticFieldProvider is Acts::MagneticFieldProvider::getField
Aside from the lookup position as a global position vector, it accepts an instance of the opaque cache object mentioned before. The return value is a Acts::Result object. It either contains the field value at the requested location, or an Acts::MagneticFieldError in case of a lookup failure, like an out-of-bounds lookup position.
Below is an example of how a client can interact with an instance of Acts::MagneticFieldProvider.
// In event context auto fieldContext = getExperimentFieldContext(); const Acts::MagneticFieldProvider& fieldProvider = getFieldProvider(); // Make an opaque cache for field lookups auto cache = fieldProvider.makeCache(fieldContext); auto lookupResult = fieldProvider.getField(Acts::Vector3{10, 10, 10}, cache); if(!lookupResult.ok()) { throw std::runtime_error{"Field lookup failure"}; } Acts::Vector3 fieldValue = *lookupResult;
Subclassed by Acts::ConstantBField, Acts::InterpolatedMagneticField, Acts::MultiRangeBField, Acts::NullBField, Acts::SolenoidBField, Acts::ToroidField, ActsPlugins::DD4hepFieldAdapter
Public Types
Public Functions
-
virtual ~MagneticFieldProvider() = default
-
virtual Result<Vector3> getField(const Vector3 &position, Cache &cache) const = 0
Retrieve magnetic field value at a given location.
Requires an instance of Acts::MagneticFieldProvider::Cache created through makeCache.
- Parameters:
position – [in] global 3D position for the lookup
cache – [inout] Field provider specific cache object
- Returns:
magnetic field vector at given position
-
virtual Cache makeCache(const MagneticFieldContext &mctx) const = 0
Make an opaque cache for the magnetic field.
Instructs the specific implementation to generate a Acts::MagneticFieldProvider::Cache instance for magnetic field lookup.
- Parameters:
mctx – The magnetic field context to generate cache for
- Returns:
Cache The opaque cache object
-
virtual ~MagneticFieldProvider() = default
-
class Material
Material description for interactions with matter.
The following parameters are used to specify the material and its interactions with traversing particles:
radiation length X0 (native length units)
nuclear interaction length L0 (native length units)
relative atomic mass Ar (unitless number)
nuclear charge number Z (elementary charge e)
molar density (native amount-of-substance unit / (native length unit)³)
The parameters can be effective or average parameters e.g. when a mixture of materials is described.
Note
Always use the opaque parameters vector to serialize/deserialize the material information. Since the internal storage might be different from the external accessors, this ensures that always the numerically optimal parameters are stored. Use the
ParametersVectortype and do not assume any particular size since we might consider to store more parameters in the future.Public Types
-
using ParametersVector = Eigen::Matrix<float, 5, 1>
Opaque parameters vector for serialization.
Public Functions
-
explicit Material(const ParametersVector ¶meters)
Construct from an encoded parameters vector.
- Parameters:
parameters – Encoded material parameters
-
inline constexpr float Ar() const
Return the relative atomic mass.
- Returns:
Relative atomic mass
-
inline bool isVacuum() const
Check if the material is vacuum.
- Returns:
True if the material is vacuum
-
inline constexpr float L0() const
Return the nuclear interaction length.
Infinity in case of vacuum.
- Returns:
Nuclear interaction length
-
float massDensity() const
Return the mass density.
- Returns:
Mass density
-
inline constexpr float meanExcitationEnergy() const
Return the mean electron excitation energy.
- Returns:
Mean electron excitation energy
-
inline constexpr float molarDensity() const
Return the molar density.
- Returns:
Molar density
-
inline constexpr float molarElectronDensity() const
Return the molar electron density.
- Returns:
Molar electron density
-
ParametersVector parameters() const
Encode the properties into an opaque parameters vector.
- Returns:
Encoded parameters vector
-
inline constexpr float X0() const
Return the radiation length.
Infinity in case of vacuum.
- Returns:
Radiation length
-
inline constexpr float Z() const
Return the nuclear charge number.
- Returns:
Nuclear charge number
Public Static Functions
-
static Material fromMassDensity(float x0, float l0, float ar, float z, float massRho)
Construct from material parameters using the mass density.
Warning
Due to the choice of native mass units, using the mass density can lead to numerical problems. Typical mass densities lead to computations with values differing by 20+ orders of magnitude.
- Parameters:
x0 – is the radiation length
l0 – is the nuclear interaction length
ar – is the relative atomic mass
z – is the nuclear charge number
massRho – is the mass density
- Returns:
Material instance constructed from the given parameters
-
static Material fromMolarDensity(float x0, float l0, float ar, float z, float molarRho)
Construct from material parameters using the molar density.
- Parameters:
x0 – is the radiation length
l0 – is the nuclear interaction length
ar – is the relative atomic mass
z – is the nuclear charge number
molarRho – is the molar density
- Returns:
Material instance constructed from the given parameters
-
static Material fromMolarDensity(float x0, float l0, float ar, float z, float molarRho, float molarElectronRho, std::optional<float> meanExcitationEnergy)
Construct from material parameters using the molar density.
- Parameters:
x0 – is the radiation length
l0 – is the nuclear interaction length
ar – is the relative atomic mass
z – is the nuclear charge number
molarRho – is the molar density
molarElectronRho – is the molar electron density
meanExcitationEnergy – is the mean electron excitation energy. If not provided it will be approximated.
- Returns:
Material instance constructed from the given parameters
-
class MaterialSlab
Material description for an object with defined thickness.
This is intended to describe concrete surface materials.
See also
Material for a description of the available parameters.
Public Functions
-
inline constexpr MaterialSlab()
Default constructor.
TODO consider removing. currently needed for default construction in grids
-
MaterialSlab(const Material &material, float thickness)
Construct from material description.
- Parameters:
material – is the material description
thickness – is the thickness of the material
-
inline bool isVacuum() const
Check if the material is vacuum.
- Returns:
True if the material is vacuum or thickness is zero/negative
-
inline constexpr const Material &material() const
Access the (average) material parameters.
- Returns:
Reference to the material properties
-
void scaleThickness(float scale)
Scale the material thickness by the given factor.
- Parameters:
scale – Factor by which to scale the thickness
-
inline constexpr float thickness() const
Return the thickness.
- Returns:
Material thickness in millimeters
-
inline constexpr float thicknessInL0() const
Return the nuclear interaction length fraction.
- Returns:
Thickness as a fraction of nuclear interaction length
-
inline constexpr float thicknessInX0() const
Return the radiation length fraction.
- Returns:
Thickness as a fraction of radiation length
Public Static Functions
-
static MaterialSlab combine(const MaterialSlab &slab1, const Material &material2, float thickness2)
Compute the average properties for a combined slab of two materials.
The averaged material slab has the combined thickness of the two input slabs and assumes the two input materials are homogeneously and continuously mixed throughout the slab.
- Parameters:
slab1 – Properties of the first material slab
material2 – Properties of the second material
thickness2 – Thickness of the second material slab. Can be negative to subtract the second material from the first slab.
- Returns:
Material slab with the combined thickness and average parameters
-
static MaterialSlab combineLayers(const MaterialSlab &layerA, const MaterialSlab &layerB)
Combine material properties of two layers by averaging them.
- Parameters:
layerA – Input layer A to average over.
layerB – Input layer B to average over.
- Returns:
The resulting object has the combined thickness of all layers but just one set of appropriately averaged material constants.
-
static MaterialSlab combineLayers(const std::vector<MaterialSlab> &layers)
Combine material properties of multiple layers by averaging them.
- Parameters:
layers – Input layers to average over.
- Returns:
The resulting object has the combined thickness of all layers but just one set of appropriately averaged material constants.
-
static inline constexpr MaterialSlab Nothing()
Create a material slab with no material content.
- Returns:
Empty material slab with zero thickness and no material
-
static inline constexpr MaterialSlab Vacuum(float thickness)
Create a vacuum material slab with specified thickness.
- Parameters:
thickness – The thickness of the vacuum region
- Returns:
Vacuum material slab with the given thickness
-
inline constexpr MaterialSlab()
-
class MeasurementSelector
Measurement selection struct selecting those measurements compatible with the given track parameter against provided criteria on one surface.
The selection criteria could be allowed maximum chi2 and allowed maximum number of measurements on one surface
If there is no compatible measurement, the measurement with the minimum chi2 will be selected and the status will be tagged as an outlier
Public Types
-
using Config = Acts::GeometryHierarchyMap<MeasurementSelectorCuts>
Geometry-dependent cut configuration.
Different components on the geometry can require different cut settings. The configuration must either contain explicit settings for all geometry components that are used or contain a global default.
Public Functions
-
MeasurementSelector()
Default constructor.
This will use the default configuration for the cuts.
-
explicit MeasurementSelector(const Config &config)
Constructor with config.
- Parameters:
config – a config instance
-
explicit MeasurementSelector(const MeasurementSelectorCuts &cuts)
Constructor with cuts.
- Parameters:
cuts – The cuts to use
-
template<typename traj_t>
Result<std::pair<typename std::vector<typename traj_t::TrackStateProxy>::iterator, typename std::vector<typename traj_t::TrackStateProxy>::iterator>> select(std::vector<typename traj_t::TrackStateProxy> &candidates, bool &isOutlier, const Logger &logger) const Function that select the measurements compatible with the given track parameter on a surface.
- Parameters:
candidates – The track state candidates which already contain predicted parameters
isOutlier – The indicator for outlier or not
logger – The logger wrapper
- Returns:
Pair of iterators into candidates marking the range of selected candidates
-
using Config = Acts::GeometryHierarchyMap<MeasurementSelectorCuts>
-
template<Concepts::SingleStepper single_stepper_t, typename component_reducer_t = MaxWeightReducerLoop>
class MultiStepperLoop Stepper based on a single-component stepper, but can handle Multi-Component Tracks (e.g., for the GSF).
Internally, this only manages a vector of states of the single stepper. This simplifies implementation, but has several drawbacks:
There are certain redundancies between the global State and the component states
The components do not share a single magnetic-field-cache
- Template Parameters:
sstepper_t – The single-component stepper type to use
component_reducer_t – How to map the multi-component state to a single component
Public Types
-
using BoundParameters = MultiComponentBoundTrackParameters
Type alias for bound track parameters.
-
using BoundState = std::tuple<BoundParameters, Jacobian, double>
Bound state tuple containing parameters, Jacobian, and path length.
-
using ComponentProxy = detail::LoopComponentProxy<typename State::Component, MultiStepperLoop>
A proxy struct which allows access to a single component of the multi-component state.
It has the semantics of a mutable reference, i.e. it requires a mutable reference of the single-component state it represents
-
using ConstComponentProxy = detail::LoopComponentProxyBase<const typename State::Component, MultiStepperLoop>
A proxy struct which allows access to a single component of the multi-component state.
It has the semantics of a const reference, i.e. it requires a const reference of the single-component state it represents
-
using Covariance = BoundMatrix
Type alias for covariance matrix.
-
using Jacobian = BoundMatrix
Type alias for jacobian matrix.
-
using Reducer = component_reducer_t
The reducer type.
-
using SingleConfig = typename SingleStepper::Config
Typedef to the Config of the single component Stepper.
-
using SingleOptions = typename SingleStepper::Options
Typedef to the Single-Component Stepper Options.
-
using SingleState = typename SingleStepper::State
Typedef to the State of the single component Stepper.
-
using SingleStepper = single_stepper_t
Typedef to the Single-Component Eigen Stepper.
Public Functions
-
inline explicit MultiStepperLoop(const Config &config, std::unique_ptr<const Logger> logger = getDefaultLogger("MultiStepperLoop", Logging::INFO))
Constructor from a configuration and optionally provided Logger.
- Parameters:
config – Configuration object containing stepper settings
logger – Logger instance for debugging output
Constructor from a magnetic field and a optionally provided Logger TODO this requires that every stepper can be constructed like this…
- Parameters:
bField – Magnetic field provider to use for propagation
logger – Logger instance for debugging output
-
inline double absoluteMomentum(const State &state) const
Absolute momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Absolute momentum magnitude from the reduced component state
-
inline ComponentProxy addComponent(State &state, const BoundTrackParameters &pars, double weight) const
Add a component to the Multistepper.
Note
: It is not ensured that the weights are normalized afterwards
Note
This function makes no garantuees about how new components are initialized, it is up to the caller to ensure that all components are valid in the end.
Note
The returned component-proxy is only garantueed to be valid until the component number is again modified
- Parameters:
state – [inout] The stepping state (thread-local cache)
pars – [in] Parameters of the component to add
weight – [in] Weight of the component to add
- Returns:
ComponentProxy for the newly added component or error
-
Result<BoundState> boundState(State &state, const Surface &surface, bool transportCov = true, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Create and return the bound state at the current position.
This transports (if necessary) the covariance to the surface and creates a bound state. It does not check if the transported state is at the surface, this needs to be guaranteed by the propagator.
Note
This is done by combining the gaussian mixture on the specified surface. If the conversion to bound states of some components fails, these components are ignored unless all components fail. In this case an error code is returned.
- Parameters:
state – [in] State that will be presented as
BoundStatesurface – [in] The surface to which we bind the state
transportCov – [in] Flag steering covariance transport
freeToBoundCorrection – [in] Flag steering non-linear correction during global to local correction
- Returns:
A bound state:
the parameters at the surface
the stepwise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline double charge(const State &state) const
Charge access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Electric charge value from the reduced component state
-
inline void clearComponents(State &state) const
Reset the number of components.
- Parameters:
state – [inout] The stepping state (thread-local cache)
-
inline auto componentIterable(State &state) const
Creates an iterable which can be plugged into a range-based for-loop to iterate over components.
Note
Use a for-loop with by-value semantics, since the Iterable returns a proxy internally holding a reference
- Parameters:
state – Multi-component stepper state to iterate over
- Returns:
Iterable range object that can be used in range-based for-loops
-
inline auto constComponentIterable(const State &state) const
Creates an constant iterable which can be plugged into a range-based for-loop to iterate over components.
Note
Use a for-loop with by-value semantics, since the Iterable returns a proxy internally holding a reference
- Parameters:
state – Multi-component stepper state to iterate over (const)
- Returns:
Const iterable range object for read-only iteration over components
-
BoundState curvilinearState(State &state, bool transportCov = true) const
Create and return a curvilinear state at the current position.
This transports (if necessary) the covariance to the current position and creates a curvilinear state.
Note
This is done as a simple average over the free representation and covariance of the components.
- Parameters:
state – [in] State that will be presented as
CurvilinearStatetransportCov – [in] Flag steering covariance transport
- Returns:
A curvilinear state:
the curvilinear parameters at given position
the stepweise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline Vector3 direction(const State &state) const
Momentum direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Normalized momentum direction vector from the reduced component state
-
inline Result<Vector3> getField(State &state, const Vector3 &pos) const
Get the field for the stepping, it checks first if the access is still within the Cell, and updates the cell if necessary.
Note
This uses the cache of the first component stored in the state
- Parameters:
state – [inout] is the propagation state associated with the track the magnetic field cell is used (and potentially updated)
pos – [in] is the field position
- Returns:
Magnetic field vector at the given position or error
-
inline double getStepSize(const State &state, ConstrainedStep::Type stype) const
Get the step size.
Note
This returns the smallest step size of all components. It uses std::abs for comparison to handle backward propagation and negative step sizes correctly.
- Parameters:
state – [in] The stepping state (thread-local cache)
stype – [in] The step size type to be returned
- Returns:
Smallest step size among all components for the requested type
-
inline void initialize(State &state, const BoundParameters &par) const
Initialize the stepper state from multi-component bound track parameters.
- Parameters:
state – The stepper state to initialize
par – The multi-component bound track parameters
-
inline State makeState(const Options &options) const
Create a state object for multi-stepping.
- Parameters:
options – The propagation options
- Returns:
Initialized state object for multi-stepper
-
inline Vector3 momentum(const State &state) const
Momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Momentum vector from the reduced component state
-
inline std::size_t numberComponents(const State &state) const
Get the number of components.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
- Returns:
Number of components in the multi-component state
-
inline std::string outputStepSize(const State &state) const
Output the Step Size of all components into one std::string.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
- Returns:
String representation of all component step sizes concatenated
-
inline ParticleHypothesis particleHypothesis(const State &state) const
Particle hypothesis.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Particle hypothesis used for this multi-component state
-
inline Vector3 position(const State &state) const
Global particle position accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Global position vector from the reduced component state
-
inline bool prepareCurvilinearState(State &state) const
If necessary fill additional members needed for curvilinearState.
Compute path length derivatives in case they have not been computed yet, which is the case if no step has been executed yet.
- Parameters:
state – [inout] The stepping state (thread-local cache)
- Returns:
true if nothing is missing after this call, false otherwise.
-
inline double qOverP(const State &state) const
QoP access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Charge over momentum (q/p) value from the reduced component state
-
inline void releaseStepSize(State &state, ConstrainedStep::Type stype) const
Release the step-size for all components.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stype – [in] The step size type to be released
-
inline void removeMissedComponents(State &state) const
Remove missed components from the component state.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
-
inline void reweightComponents(State &state) const
Reweight the components.
- Parameters:
state – [inout] The stepping state (thread-local cache)
-
inline const SingleStepper &singleStepper() const
Get the single stepper instance.
- Returns:
Reference to the single stepper instance used internally
-
Result<double> step(State &state, Direction propDir, const IVolumeMaterial *material) const
Perform a Runge-Kutta track parameter propagation step.
The state contains the desired step size. It can be negative during backwards track propagation, and since we’re using an adaptive algorithm, it can be modified by the stepper class during propagation.
- Parameters:
state – [inout] The state of the stepper
propDir – is the direction of propagation
material – is the material properties
- Returns:
the result of the step
-
inline double time(const State &state) const
Time access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Time coordinate from the reduced component state
-
inline void transportCovarianceToBound(State &state, const Surface &surface, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
Note
no check is done if the position is actually on the surface
- Template Parameters:
surface_t – the Surface type
- Parameters:
state – [inout] State of the stepper
surface – [in] is the surface to which the covariance is forwarded
freeToBoundCorrection – [in] Flag steering non-linear correction during global to local correction to
-
inline void transportCovarianceToCurvilinear(State &state) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
- Parameters:
state – [inout] State of the stepper
-
template<typename object_intersection_t>
inline void updateStepSize(State &state, const object_intersection_t &oIntersection, Direction direction, ConstrainedStep::Type stype) const Update step size.
This method intersects the provided surface and update the navigation step estimation accordingly (hence it changes the state). It also returns the status of the intersection to trigger onSurface in case the surface is reached.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
oIntersection – [in] The ObjectIntersection to layer, boundary, etc
direction – [in] The propagation direction
stype – [in] The step size type to be set
-
inline void updateStepSize(State &state, double stepSize, ConstrainedStep::Type stype) const
Update step size - explicitly with a double.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stepSize – [in] The step size value
stype – [in] The step size type to be set
-
inline IntersectionStatus updateSurfaceStatus(State &state, const Surface &surface, std::uint8_t index, Direction navDir, const BoundaryTolerance &boundaryTolerance, double surfaceTolerance, ConstrainedStep::Type stype, const Logger &logger = getDummyLogger()) const
Update surface status.
It checks the status to the reference surface & updates the step size accordingly
- Parameters:
state – [inout] The stepping state (thread-local cache)
surface – [in] The surface provided
index – [in] The surface intersection index
navDir – [in] The navigation direction
boundaryTolerance – [in] The boundary check for this status update
surfaceTolerance – [in] Surface tolerance used for intersection
stype – [in] The step size type to be set
logger – [in] A
Loggerinstance
- Returns:
IntersectionStatus indicating the overall status of all components relative to the surface
Public Static Attributes
-
static constexpr int maxComponents = std::numeric_limits<int>::max()
How many components can this stepper manage?
-
struct Config : public SingleStepper::Config
Configuration for the multi-stepper loop.
Public Members
-
std::size_t stepLimitAfterFirstComponentOnSurface = 50
Limits the number of steps after at least one component reached the surface.
-
std::size_t stepLimitAfterFirstComponentOnSurface = 50
-
struct Options : public SingleOptions
-
struct State
State container for multi-component stepping.
Public Functions
Public Members
-
bool covTransport = false
Whether to transport covariance.
-
ParticleHypothesis particleHypothesis = ParticleHypothesis::pion()
Particle hypothesis.
-
double pathAccumulated = 0.
Accumulated path length.
-
StepperStatistics statistics
The stepper statistics.
-
std::optional<std::size_t> stepCounterAfterFirstComponentOnSurface
Step-limit counter which limits the number of steps when one component reached a surface.
-
std::size_t steps = 0
Number of steps taken.
-
struct Component
The struct that stores the individual components.
Public Functions
-
inline Component(SingleState state_, double weight_, IntersectionStatus status_)
Constructor for a multi-stepper component.
- Parameters:
state_ – The single state for this component
weight_ – The weight of this component
status_ – The intersection status of this component
Public Members
-
SingleState state
Individual component state for propagation.
-
IntersectionStatus status
Intersection status of this component.
-
double weight
Statistical weight of this component.
-
inline Component(SingleState state_, double weight_, IntersectionStatus status_)
-
bool covTransport = false
-
template<typename derived_t>
class MultiTrajectory Store a trajectory of track states with multiple components.
This container supports both simple, sequential trajectories as well as combinatorial or multi-component trajectories. Each point can store a parent point such that the trajectory forms a directed, acyclic graph of sub-trajectories. From a set of endpoints, all possible sub-components can be easily identified. Some functionality is provided to simplify iterating over specific sub-components.
MultiTrajectory track state iteration
- template<typename F> void visitBackwards(IndexType iendpoint, F &&callable) const requires detail_lt void applyBackwards (IndexType iendpoint, F &&callable) requires(!ReadOnly) &&detail_lt
Visit all previous states starting at a given endpoint.
Note
Only available if the MultiTrajectory is not read-only Range for the track states from
iendpointto the trajectory startNote
Const version Range for the track states from
iendpointto the trajectory start, i.e from the outside in.Note
Only available if the MultiTrajectory is not read-only
Note
Mutable version
Warning
If the trajectory contains multiple components with common points, this can have an impact on the other components.
- Param iendpoint:
index of the last state
- Param callable:
non-modifying functor to be called with each point Apply a function to all previous states starting at a given endpoint.
- Param iendpoint:
index of the last state
- Param callable:
modifying functor to be called with each point
- Param iendpoint:
Trajectory entry point to start from
- Param iendpoint:
Trajectory entry point to start from
- Return:
Iterator pair to iterate over
- Return:
Iterator pair to iterate over
-
inline auto forwardTrackStateRange(IndexType istartpoint) const
Range for the track states from
istartpointto the trajectory end, i.e from inside out.Note
Const version
- Parameters:
istartpoint – Trajectory state index for the innermost track state to start from
- Returns:
Iterator pair to iterate over
-
inline auto forwardTrackStateRange(IndexType istartpoint)
requires (!ReadOnly) Range for the track states from
istartpointto the trajectory end, i.e from inside out.Note
Only available if the MultiTrajectory is not read-only
- Parameters:
istartpoint – Trajectory state index for the innermost track state to start from
- Returns:
Iterator pair to iterate over
MultiTrajectory track state (proxy) access and manipulation
These methods allow accessing track states, i.e. adding or retrieving a track state proxy that points at a specific track state in the container.
-
inline ConstTrackStateProxy getTrackState(IndexType istate) const
Access a read-only point on the trajectory by index.
Note
Only available if the MultiTrajectory is not read-only
- Parameters:
istate – The index to access
- Returns:
Read only proxy to the stored track state
-
inline TrackStateProxy getTrackState(IndexType istate)
requires (!ReadOnly) Access a writable point on the trajectory by index.
Note
Only available if the MultiTrajectory is not read-only
- Parameters:
istate – The index to access
- Returns:
Read-write proxy to the stored track state
-
inline IndexType addTrackState(TrackStatePropMask mask = TrackStatePropMask::All, IndexType iprevious = kInvalid)
requires (!ReadOnly) Add a track state without providing explicit information.
Which components of the track state are initialized/allocated can be controlled via
maskNote
Only available if the MultiTrajectory is not read-only
- Parameters:
mask – The bitmask that instructs which components to allocate and which to leave invalid
iprevious – index of the previous state, kInvalid if first
- Returns:
Index of the newly added track state
-
inline TrackStateProxy makeTrackState(TrackStatePropMask mask = TrackStatePropMask::All, IndexType iprevious = kInvalid)
requires (!ReadOnly) Add a track state to the container and return a track state proxy to it This effectively calls
addTrackStateandgetTrackState.Note
Only available if the track state container is not read-only
- Parameters:
mask – Mask indicating which track state components to allocate
iprevious – Index of the previous track state for linking
- Returns:
a track state proxy to the newly added track state
MultiTrajectory column management
MultiTrajectory can manage a set of common static columns, and dynamic columns that can be added at runtime.
This set of methods allows you to manage the dynamic columns.
-
template<typename T>
inline void addColumn(std::string_view key)
requires (!ReadOnly) Add a column to the
MultiTrajectory.Note
This takes a string argument rather than a hashed string to maintain compatibility with backends.
Note
Only available if the MultiTrajectory is not read-only
- Template Parameters:
T – Type of the column values to add
- Parameters:
key – the name of the column to be added
-
inline bool hasColumn(HashedString key) const
Check if a column with a key
keyexists.- Parameters:
key – Key to check for a column with
- Returns:
True if the column exists, false if not.
Public Types
-
using ConstTrackStateProxy = Acts::TrackStateProxy<Derived, MeasurementSizeMax, true>
Alias for the const version of a track state proxy, with the same backends as this container.
-
using IndexType = TrackIndexType
The index type of the track state container.
-
using TrackStateProxy = Acts::TrackStateProxy<Derived, MeasurementSizeMax, false>
Alias for the mutable version of a track state proxy, with the same backends as this container.
Public Functions
Public Static Attributes
-
static constexpr IndexType kInvalid = kTrackIndexInvalid
Sentinel value that indicates an invalid index.
-
static constexpr unsigned int MeasurementSizeMax = kMeasurementSizeMax
Maximum number of measurement dimensions supported by this trajectory.
Friends
- friend class MultiTrajectory
- friend class AnyTrackStateProxy
- friend class detail_anytstate::TrackStateHandler
- friend class TrackStateProxy< Derived, MeasurementSizeMax, false >
- friend class TrackStateProxy< Derived, MeasurementSizeMax, true >
Class to be used for gaps in Volumes as a navigational link.
Navigation Layers have a surface representation, but should usually never be propagated to.
Public Functions
Default Constructor - deleted.
Copy Constructor - deleted.
Destructor.
Geometric isOnLayer() method using isOnSurface() with Layer specific tolerance.
- Parameters:
gctx – The current geometry context object, e.g. alignment
gp – is the global position for the check
boundaryTolerance – is the boundary check directive
- Returns:
boolean that indicates if the position is on surface
Assignment operator - deleted.
The binning position method.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the axis direction for which the reference position is requested
as default the center is given, but may be overloaded
- Returns:
The return vector can be used for binning in a TrackingVolume
Accept layer according to the following collection directives.
Note
navigation layers are never accepted
- Parameters:
resolveSensitive – is the prescription to find the sensitive surfaces
resolveMaterial – is the precription to find material surfaces
resolvePassive – is the prescription to find all passive surfaces
- Returns:
a boolean whether the layer is accepted for processing
Transforms the layer into a Surface representation for extrapolation In general, extrapolation to a surface should be avoided.
- Returns:
Const reference to the navigation surface
Non-const version of surface representation access.
- Returns:
Mutable reference to the navigation surface
Public Static Functions
Factory Constructor - the surface representation is given by pointer (ownership passed)
- Parameters:
sRepresentation – is the representation for extrapolation
thickness – is the thickness for the binning
- Returns:
Shared pointer to the created navigation layer
Steers the propagation through the geometry by providing the next surface to be targeted.
The Navigator is part of the propagation and responsible for steering the surface sequence to encounter all the relevant surfaces which are intersected by the trajectory.
The current navigation stage is cached in the state struct and updated when necessary. If any surface in the extrapolation flow is hit, it is set to the navigation state, such that other actors can deal with it.
The current target surface is referenced by an index which points into the navigation candidates. The navigation candidates are ordered by the path length to the surface. If a surface is hit, the
state.currentSurfacepointer is set. This actors to observe that we are on a surface.Public Types
Type alias for geometry version enumeration.
Type alias for navigation boundary candidates container.
Type alias for generic navigation candidates container.
Type alias for navigation layer candidates container.
Type alias for navigation surface candidates container.
The navigation stage.
Values:
Public Functions
Constructor with configuration object.
- Parameters:
cfg – The navigator configuration
_logger – a logger instance
Check if the current target is still valid.
This function checks if the target is valid.
- Parameters:
state – The navigation state
position – The current position
direction – The current direction
- Returns:
True if the target is valid
Get the current surface from navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to current surface, or nullptr if none
Get the current volume from navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to current volume, or nullptr if none
Get material properties of the current volume.
- Parameters:
state – The navigation state
- Returns:
Pointer to volume material, or nullptr if no volume or material
Check if navigation has reached the end of the world (no current volume)
- Parameters:
state – The navigation state
- Returns:
True if end of world is reached
Handle the surface reached.
This function handles the surface reached.
- Parameters:
state – The navigation state
position – The current position
direction – The current direction
surface – The surface reached
Initialize the navigator state.
This function initializes the navigator state for a new propagation.
- Parameters:
state – The navigation state
position – The start position
direction – The start direction
propagationDirection – The propagation direction
- Returns:
Indication if the initialization was successful
Create a navigation state from options.
- Parameters:
options – The navigation options
- Returns:
A new navigation state
Check if navigation should be interrupted.
- Parameters:
state – The navigation state
- Returns:
True if navigation break flag is set
Get the next target surface.
This function gets the next target surface for the propagation.
- Parameters:
state – The navigation state
position – The current position
direction – The current direction
- Returns:
The next target surface
Get the starting surface from navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to start surface, or nullptr if none
Get the target surface from navigation state.
- Parameters:
state – The navigation state
- Returns:
Pointer to target surface, or nullptr if none
The navigator configuration.
Public Members
stop at every material surface (whether it is passive or not)
stop at every surface regardless what it is
stop at every sensitive surface (whether it has material or not)
Tracking Geometry for this Navigator.
The navigator options.
Public Functions
Constructor with geometry context.
- Parameters:
gctx – The geometry context for the navigation
Set the plain navigation options.
- Parameters:
options – The plain navigator options to set
Nested State struct.
It acts as an internal state which is created for every propagation and meant to keep thread-local navigation information.
Public Functions
Constructor with navigation options.
- Parameters:
options_ – The navigation options for this state
Get reference to current navigation boundary.
- Returns:
Reference to current boundary intersection
Get reference to current navigation candidate.
- Returns:
Reference to current boundary intersection
Get reference to current navigation layer.
- Returns:
Reference to current layer intersection
Get reference to current navigation surface.
- Returns:
Reference to current navigation target
Reset navigation state after switching layers.
Reset navigation state after switching volumes.
Completely reset navigation state to initial conditions.
Public Members
Current layer during navigation.
Current surface during navigation.
Current volume during navigation.
Free candidates not part of the tracking geometry.
and a boolean indicating whether the surface has already been reached during propagation
Surfaces that are not part of the tracking geometry.
the vector of boundary surfaces to work through
the current boundary index of the navigation state
the current candidate index of the navigation state
the vector of navigation candidates to work through
Flag to break navigation loop.
Current navigation stage in the state machine.
the current layer index of the navigation state
the vector of navigation layers to work through
the current surface index of the navigation state
the vector of navigation surfaces to work through
Navigation options configuration.
Management of policy state allocation and deallocation.
Layer where the navigation started.
Surface where the navigation started.
Volume where the navigation started.
Statistics collection for navigation performance.
Stream for navigation debugging and monitoring.
Target surface for navigation.
Warning
doxygenclass: Cannot find class “Acts::NeutralParticleHypothesis” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygenclass: Cannot find class “Acts::NonNeutralCharge” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygenclass: Cannot find class “Acts::NonNeutralChargedParticleHypothesis” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
class NullBField : public Acts::MagneticFieldProvider
Null bfield which returns 0 always.
Public Functions
-
NullBField() = default
Default constructor.
-
inline virtual Result<Vector3> getField(const Vector3 &position, MagneticFieldProvider::Cache &cache) const override
Retrieve magnetic field value at a given location.
Requires an instance of Acts::MagneticFieldProvider::Cache created through makeCache.
Note
The
positionis ignored and only kept as argument to provide a consistent interface with other magnetic field services.- Parameters:
position – [in] global 3D position for the lookup
cache – [inout] Field provider specific cache object
- Returns:
magnetic field vector at given position
-
inline bool isInside(const Vector3&) const
check whether given 3D position is inside look-up domain
Note
The method will always return true for the null B-Field
- Returns:
trueif position is inside the defined look-up grid, otherwisefalse
-
inline virtual Acts::MagneticFieldProvider::Cache makeCache(const Acts::MagneticFieldContext &mctx) const override
Make an opaque cache for the magnetic field.
Instructs the specific implementation to generate a Acts::MagneticFieldProvider::Cache instance for magnetic field lookup.
- Parameters:
mctx – The magnetic field context to generate cache for
- Returns:
Cache The opaque cache object
-
struct Cache
Cache object for the null magnetic field provider.
Public Functions
-
inline explicit Cache(const MagneticFieldContext&)
constructor with context
-
inline explicit Cache(const MagneticFieldContext&)
-
NullBField() = default
-
class ParticleHypothesis
Particle hypothesis used in reconstruction.
The reconstruction hypothesis consists of absolute PDG code, mass and absolute charge.
Public Functions
-
inline constexpr ParticleHypothesis(PdgParticle absPdg, float mass, ChargeHypothesis charge, std::optional<double> momentum = std::nullopt)
Creates a particle hypothesis using absolute PDG, mass and the charge type.
- Parameters:
absPdg – the absolute PDG
mass – the particle mass
charge – the charge type
momentum – the optional particle momentum
-
inline constexpr ParticleHypothesis(PdgParticle absPdg, float mass, float absCharge, std::optional<double> momentum = std::nullopt)
Creates a particle hypothesis using absolute PDG, mass and the charge type.
- Parameters:
absPdg – the absolute PDG
mass – the particle mass
absCharge – the absolute charge
momentum – the optional particle momentum
-
inline explicit ParticleHypothesis(PdgParticle absPdg, std::optional<double> momentum = std::nullopt)
Creates a particle hypothesis using the absolute PDG.
The mass and charge is looked up using findMass and findCharge. If the lookup fails an exception is thrown.
- Parameters:
absPdg – the absolute PDG
momentum – the optional particle momentum
-
inline float absoluteCharge() const noexcept
Get the hypothesized absolute charge.
- Returns:
The absolute charge magnitude
-
inline constexpr PdgParticle absolutePdg() const noexcept
Get the hypothesized absolute PDG.
- Returns:
The absolute PDG particle identifier
-
inline constexpr const ChargeHypothesis &charge() const noexcept
Get the hypothesized charge.
- Returns:
Reference to the charge type object
-
inline constexpr float extractCharge(double qOverP) const noexcept
Extracts the signed charge from the
q over ptrack parameter using the charge hypothesis.- Parameters:
qOverP – the
q over ptrack parameter.- Returns:
The extracted signed charge
-
inline constexpr double extractMomentum(double qOverP) const noexcept
Extracts the particle momentum from the
q over ptrack parameter using the charge hypothesis.- Parameters:
qOverP – the
q over ptrack parameter.- Returns:
The extracted absolute momentum
-
inline bool hasMomentumHypothesis() const noexcept
Check if the particle hypothesis has a hypothesized momentum.
- Returns:
True if a momentum hypothesis is present, false otherwise
-
inline constexpr float mass() const noexcept
Get the hypothesized mass.
- Returns:
The particle mass
-
inline double momentumHypothesis() const
Get the hypothesized momentum.
- Returns:
The particle momentum
-
inline constexpr double qOverP(double momentum, float signedQ) const noexcept
Calculate the
q over ptrack parameter with the given absolute momentum and charge.- Parameters:
momentum – the absolute momentum.
signedQ – the signed charge.
- Returns:
The calculated charge over momentum ratio
-
inline std::ostream &toStream(std::ostream &os) const
Output stream representation of the particle hypothesis.
- Parameters:
os – Output stream to write to
- Returns:
Modified output stream for chaining
-
inline ParticleHypothesis withAlteredAbsoluteCharge(float absoluteCharge) const
Create a new particle hypothesis with the same absolute PDG and mass but a different charge.
- Parameters:
absoluteCharge – The new absolute charge value
- Returns:
A new ParticleHypothesis with the updated charge
-
inline ParticleHypothesis withAlteredMass(float mass) const
Create a new particle hypothesis with the same absolute PDG and charge but a different mass.
- Parameters:
mass – The new mass value
- Returns:
A new ParticleHypothesis with the updated mass
-
inline ParticleHypothesis withAlteredPdg(PdgParticle absPdg) const
Create a new particle hypothesis with the same mass and charge but a different absolute PDG.
- Parameters:
absPdg – The new absolute PDG value
- Returns:
A new ParticleHypothesis with the updated absolute PDG
-
inline ParticleHypothesis withMomentumHypothesis(double momentum) const
Create a new particle hypothesis with the same absolute PDG and mass but a different momentum hypothesis.
- Parameters:
momentum – The new momentum hypothesis value
- Returns:
A new ParticleHypothesis with the updated momentum
-
inline ParticleHypothesis withMomentumHypothesis(std::optional<double> momentum) const
Create a new particle hypothesis with the same absolute PDG and mass but a different momentum hypothesis.
- Parameters:
momentum – The new optional momentum hypothesis value
- Returns:
A new ParticleHypothesis with the updated momentum
-
inline ParticleHypothesis withoutMomentumHypothesis() const
Create a new particle hypothesis with the same absolute PDG and mass but no momentum hypothesis.
- Returns:
A new ParticleHypothesis with no momentum hypothesis
Public Static Functions
-
static inline ParticleHypothesis chargedGeantino()
Create a charged geantino particle hypothesis with unit charge.
- Returns:
Charged geantino particle hypothesis with any charge type
-
static inline ParticleHypothesis chargedGeantino(float absoluteCharge)
Create a charged geantino particle hypothesis with custom charge.
- Parameters:
absoluteCharge – The absolute charge value
- Returns:
Charged geantino particle hypothesis with any charge type
-
static inline ParticleHypothesis electron()
Create an electron particle hypothesis.
- Returns:
Electron particle hypothesis with any charge type
-
static inline ParticleHypothesis geantino()
Create a neutral geantino particle hypothesis (massless neutral particle)
- Returns:
Neutral geantino particle hypothesis with any charge type
-
static inline ParticleHypothesis kaon()
Create a charged kaon particle hypothesis.
- Returns:
Charged kaon particle hypothesis with any charge type
-
static inline ParticleHypothesis muon()
Create a muon particle hypothesis.
- Returns:
Muon particle hypothesis with any charge type
-
static inline ParticleHypothesis photon()
Create a photon particle hypothesis.
- Returns:
Photon particle hypothesis with any charge type
-
static inline ParticleHypothesis pion()
Create a charged pion particle hypothesis.
- Returns:
Charged pion particle hypothesis with any charge type
-
static inline ParticleHypothesis pion0()
Create a neutral pion particle hypothesis.
- Returns:
Neutral pion particle hypothesis with any charge type
-
static inline ParticleHypothesis pionLike(float absoluteCharge)
Create a pion-like particle hypothesis with custom charge.
- Parameters:
absoluteCharge – The absolute charge value
- Returns:
Pion-like particle hypothesis with any charge type
-
static inline ParticleHypothesis proton()
Create a proton particle hypothesis.
- Returns:
Proton particle hypothesis with any charge type
Friends
-
inline friend std::ostream &operator<<(std::ostream &os, const ParticleHypothesis &particleHypothesis)
Output stream operator for particle hypothesis.
- Parameters:
os – Output stream to write to
particleHypothesis – The particle hypothesis to output
- Returns:
Reference to output stream for chaining
-
inline constexpr ParticleHypothesis(PdgParticle absPdg, float mass, ChargeHypothesis charge, std::optional<double> momentum = std::nullopt)
-
class PerigeeSurface : public Acts::LineSurface
Class describing the Line to which the Perigee refers to.
The Surface axis is fixed to be the z-axis of the Tracking frame. It inherits from StraingLineSurface.
Public Functions
-
virtual std::string name() const final
Return properly formatted class name for screen output */.
- Returns:
String representation of the surface type name
-
PerigeeSurface &operator=(const PerigeeSurface &other)
Assignment operator.
- Parameters:
other – is the source surface to be assigned
- Returns:
Reference to this surface for assignment chaining
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int ingoreSegments) const final
Return a Polyhedron for the surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
ingoreSegments – is an ignored parameter
- Returns:
A list of vertices and a face/facett description of it
-
virtual SurfaceType type() const final
Return the surface type.
- Returns:
Surface type identifier for perigee surfaces
-
virtual std::string name() const final
-
class PlanarBounds : public Acts::SurfaceBounds
common base class for all bounds that are in a local x/y cartesian frame
simply introduced to avoid wrong bound assignments to surfaces
Subclassed by Acts::ConvexPolygonBoundsBase, Acts::DiamondBounds, Acts::EllipseBounds, Acts::RectangleBounds, Acts::TrapezoidBounds
Public Functions
-
virtual const RectangleBounds &boundingBox() const = 0
Bounding box parameters.
- Returns:
rectangle bounds for a bounding box
-
inline virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
inline virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
virtual std::vector<Vector2> vertices(unsigned int quarterSegments = 2u) const = 0
Return the vertices.
Note
for planar bounds without curved segments
quarterSegmentsis ignored- Parameters:
quarterSegments – is the number of segments used to describe curved segments in a quarter of the phi range. If it is 1, then only the extrema points in phi are inserted next to the segment corners.
- Returns:
vector for vertices in 2D
-
class PlaneLayer : public virtual Acts::PlaneSurface, public Acts::Layer
Class to describe a planar detector layer for tracking, it inherits from both, Layer base class and PlaneSurface class.
Public Functions
-
PlaneLayer() = delete
-
PlaneLayer(const PlaneLayer &pla) = delete
-
~PlaneLayer() override = default
-
PlaneLayer &operator=(const PlaneLayer&) = delete
-
virtual const PlaneSurface &surfaceRepresentation() const override
Transforms the layer into a Surface representation for extrapolation.
- Returns:
returns a reference to a PlaneSurface
-
virtual PlaneSurface &surfaceRepresentation() override
Non-const version of surface representation access.
- Returns:
Mutable reference to the plane surface
Public Static Functions
Factory for a shared plane layer.
- Parameters:
transform – which places the layer in the global frame
pbounds – the planar bounds that define the layer dimensions
surfaceArray – is the surface array that holds the sensitive surfaces
thickness – is the thickness of the layer (normal direction to plane)
ad – is the approach descriptor for describing the approach surface
laytyp – is the layer type
- Returns:
shared pointer to a PlaneLayer
-
PlaneLayer() = delete
-
class PlaneSurface : public Acts::RegularSurface
Class for a planaer in the TrackingGeometry.
The PlaneSurface extends the Surface class with the possibility to convert local to global positions (vice versa).
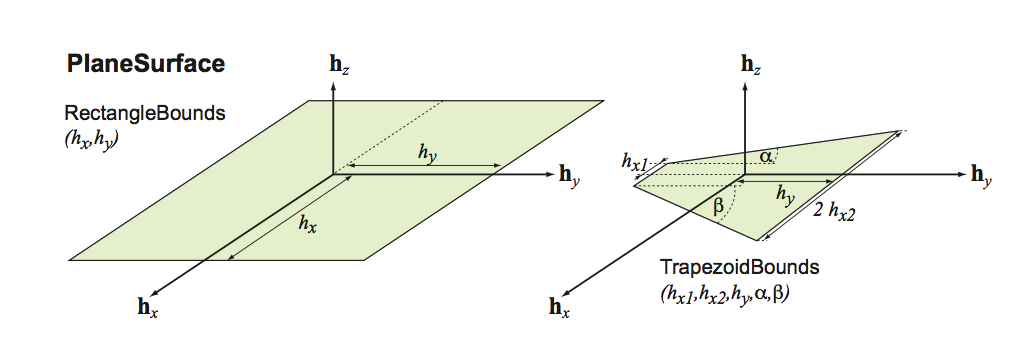
Subclassed by Acts::PlaneLayer
Public Functions
Overwrite the existing surface bounds with new ones.
- Parameters:
newBounds – Pointer to the new bounds
-
virtual const SurfaceBounds &bounds() const override
Return method for bounds object of this surfrace.
- Returns:
Reference to the surface bounds
-
const std::shared_ptr<const PlanarBounds> &boundsPtr() const
This method returns the shared_ptr to the DiscBounds.
- Returns:
Shared pointer to the planar bounds
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
Convert a global position to a local one this is the most generic interface, which is implemented by all surfaces.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
direction – is the direction of the local position (ignored for
RegularSurface)tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const override
Global to local transformation.
Note
For planar surfaces the momentum direction is ignored in the global to local transformation
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
tolerance – optional tolerance within which a point is considered valid on surface
- Returns:
a Result<Vector2> which can be !ok() if the operation fails
-
Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const = 0
Convert a global position to a local one.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual MultiIntersection3D intersect(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::Infinite(), double tolerance = s_onSurfaceTolerance) const final
Straight line intersection.
mathematical motivation:
the equation of the plane is given by: \( \vec n \cdot \vec x = \vec n \cdot \vec p,\) where \( \vec n = (n_{x}, n_{y}, n_{z})\) denotes the normal vector of the plane, \( \vec p = (p_{x}, p_{y}, p_{z})\) one specific point on the plane and \( \vec x = (x,y,z) \) all possible points on the plane.
Given a line with:\( \vec l(u) = \vec l_{1} + u \cdot \vec v \)
,
the solution for
\( u \) can be written: \( u = \frac{\vec n (\vec p - \vec l_{1})}{\vec n \vec v}\) If the denominator is 0 then the line lies:either in the plane
perpendicular to the normal of the plane
Note
expected to be normalized)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The start position of the intersection attempt
direction – The direction of the intersection attempt, (
boundaryTolerance – The boundary check directive
tolerance – the tolerance used for the intersection
- Returns:
the
MultiIntersection3Dobject
-
virtual Matrix<2, 3> localCartesianToBoundLocalDerivative(const GeometryContext &gctx, const Vector3 &position) const final
Calculate the derivative of bound track parameters local position w.r.t.
position in local 3D Cartesian coordinates
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position of the parameters in global
- Returns:
Derivative of bound local position w.r.t. position in local 3D cartesian coordinates
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const override
Local to global transformation.
Note
For planar surfaces the momentum direction is ignored in the local to global transformation
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
the global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
The global position by value
-
Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const final
Local to global transformation.
This is the most generic interface, which is implemented by all surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
direction – global 3D momentum direction (ignored for
RegularSurface)
- Returns:
The global position by value
-
std::pair<std::shared_ptr<PlaneSurface>, bool> mergedWith(const PlaneSurface &other, AxisDirection direction, const Logger &logger = getDummyLogger()) const
Merge two plane surfaces into a single one.
Note
The surfaces need to be compatible, i.e. have bounds that align along merging direction, and have the same bound size along the non-merging direction
Note
The returned boolean is
falseifthisis left or counter-clockwise ofother, andtrueif not.- Parameters:
other – The other plane surface to merge with
direction – The direction: either
AxisXorAxisYlogger – The logger to use
- Returns:
The merged plane surface and a boolean indicating if surfaces are reversed
-
virtual std::string name() const override
Return properly formatted class name for screen output.
- Returns:
String representation of the class name
-
Vector3 normal(const GeometryContext &gctx) const
Get the normal vector, independent of the location.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
The normal vector
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const final
Get the normal vector of this surface at a given local position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position is ignored
- Returns:
Normal vector as Vector3 by value
-
Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Calculate the normal vector of the surface This overload requires an on-surface local position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position where the normal vector is constructed
- Returns:
normal vector by value
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const final
Calculate the normal vector of the surface This overload is fully generic, fulfills the Surface interface and accepts a global position and a direction.
For
RegularSurfacethis is equivalent to the normal overload, ignoring thedirection- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – is the global position where the normal vector is constructed
direction – is the direction of the normal vector (ignored for
RegularSurface)
- Returns:
Normal vector at the given position
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const final
Get the normal vector of this surface at a given global position.
Note
The
positionis required to be on-surface.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global positiono (for PlaneSurface this is ignored)
- Returns:
The normal vector
-
Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const = 0
Calculate the normal vector of the surface This overload accepts a global position.
- Parameters:
position – is the global position where the normal vector is constructed
gctx – The current geometry context object, e.g. alignment
- Returns:
normal vector by value
-
PlaneSurface &operator=(const PlaneSurface &other)
Assignment operator.
- Parameters:
other – The source PlaneSurface for assignment
- Returns:
Reference to this PlaneSurface after assignment
-
virtual double pathCorrection(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const final
Method that calculates the correction due to incident angle.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position (ignored for PlaneSurface)
direction – global 3D momentum direction (ignored for PlaneSurface)
- Returns:
a double representing the scaling factor
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int quarterSegments) const override
Return a Polyhedron for the surfaces.
Note
for planar surfaces without curved segments
quarterSegmentsis ignored- Parameters:
gctx – The current geometry context object, e.g. alignment
quarterSegments – is the number of segments used to describe curved segments in a quarter of the phi range. If it is 1, then only the extrema points in phi are inserted next to the segment corners.
- Returns:
A list of vertices and a face/facett description of it
-
RotationMatrix3 referenceFrame(const GeometryContext &gctx) const
Return method for the reference frame This is the frame in which the covariance matrix is defined (specialized by all surfaces)
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
RotationMatrix3 which defines the three axes of the measurement frame
-
RotationMatrix3 referenceFrame(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Return method for the reference frame This is the frame in which the covariance matrix is defined (specialized by all surfaces)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
direction – global 3D momentum direction (optionally ignored)
- Returns:
RotationMatrix3 which defines the three axes of the measurement frame
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const final
The axis position is the position calculated for a certain axis type.
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the axis direction of reference position request
- Returns:
position that can be used for this axis
-
virtual SurfaceType type() const override
Return the surface type.
- Returns:
Surface type identifier
Propagator for particles (optionally in a magnetic field)
The Propagator works with a state objects given at function call This state object contains the thread local state objects
Navigator::state_type for object navigation and screen output
Stepper::state_type state for the actual transport caching (pos,dir,field)
This Propagator class serves as high-level steering code for propagating track parameters. The actual implementation of the propagation has to be implemented in the stepper_t object, which has to provide the following:
a function for performing a single propagation step
a type mapping for: initial track parameter type -> type of final track parameters
a type mapping for: (initial track parameter type and destination surface type) -> type of final track parameters
a type mapping for: initial track parameter type -> type of internal state object
a type mapping for: (initial track parameter type and destination surface type) -> type of internal state object
- Template Parameters:
stepper_t – Type of stepper implementation of the propagation
naviagor_t – Type of the navigator (optional)
Public Types
Type of the navigator in use.
Type of the navigator options.
Type of the navigator state.
-
template<typename actor_list_t = ActorList<>>
using Options = PropagatorOptions<StepperOptions, NavigatorOptions, actor_list_t> Type of the propagator options with actor list.
-
template<typename propagator_options_t>
using ResultType = typename result_type_helper<propagator_options_t>::type Type of the propagation result derived from the propagator options.
- Template Parameters:
propagator_options_t – Type of the propagator options
-
template<typename propagator_options_t>
using State = typename state_type_helper<propagator_options_t>::type Type of the propagation state derived from the propagator options.
- Template Parameters:
propagator_options_t – Type of the propagator options
Public Functions
Constructor from implementation object.
- Parameters:
stepper – The stepper implementation is moved to a private member
navigator – The navigator implementation, moved to a private member
_logger – a logger instance
-
template<typename propagator_state_t, typename path_aborter_t = PathLimitReached>
Result<void> initialize(propagator_state_t &state, const BoundParameters &start) const Initialize the propagator state.
This function initializes the propagator state for a new propagation.
- Template Parameters:
propagator_state_t – Type of the propagator state object
path_aborter_t – The path aborter type to be added
- Parameters:
state – [inout] The propagator state object
start – [in] Initial track parameters to propagate
- Returns:
Indication if the initialization was successful
-
template<typename propagator_state_t, typename propagator_options_t>
Result<ResultType<propagator_options_t>> makeResult(propagator_state_t state, Result<void> result, const propagator_options_t &options, bool createFinalParameters, const Surface *target = nullptr) const Builds the propagator result object.
This function creates the propagator result object from the propagator state object. The
resultis passed to pipe a potential error from the propagation call. Theoptionsare used to determine the type of the result object. ThecreateFinalParametersflag is used to determine if the result should contain final track parameters.- Template Parameters:
propagator_state_t – Type of the propagator state object
propagator_options_t – Type of the propagator options
- Parameters:
state – [in] Propagator state object
result – [in] Result of the propagation
options – [in] Propagation options
createFinalParameters – [in] Whether to produce parameters at the end of the propagation
target – [in] Surface to be used for the final parameters, if createFinalParameters is true If nullptr, the current surface of the navigator will be used
- Returns:
Propagation result
-
template<typename propagator_options_t, typename path_aborter_t = PathLimitReached>
auto makeState(const propagator_options_t &options) const Builds the propagator state object.
This function creates the propagator state object from the initial track parameters and the propagation options.
- Template Parameters:
propagator_options_t – Type of the propagator options
path_aborter_t – The path aborter type to be added
- Parameters:
options – [in] Propagation options
- Returns:
Propagator state object
-
template<typename propagator_options_t, typename target_aborter_t = SurfaceReached, typename path_aborter_t = PathLimitReached>
auto makeState(const Surface &target, const propagator_options_t &options) const Builds the propagator state object.
This function creates the propagator state object from the initial track parameters, the target surface, and the propagation options.
- Template Parameters:
propagator_options_t – Type of the propagator options
target_aborter_t – The target aborter type to be added
path_aborter_t – The path aborter type to be added
- Parameters:
target – [in] Target surface of to propagate to
options – [in] Propagation options
- Returns:
Propagator state object
Access to the navigator instance.
- Returns:
Const reference to the navigator
-
template<typename propagator_options_t, typename path_aborter_t = PathLimitReached>
Result<ResultType<propagator_options_t>> propagate(const BoundParameters &start, const propagator_options_t &options, bool createFinalParameters = true) const Propagate track parameters.
This function performs the propagation of the track parameters using the internal stepper implementation, until at least one abort condition is fulfilled or the maximum number of steps/path length provided in the propagation options is reached.
- Template Parameters:
propagator_options_t – Type of the propagator options
path_aborter_t – The path aborter type to be added
- Parameters:
start – [in] initial track parameters to propagate
options – [in] Propagation options, type Options<,>
createFinalParameters – [in] Whether to produce parameters at the end of the propagation
- Returns:
Propagation result containing the propagation status, final track parameters, and output of actions (if they produce any)
-
template<typename propagator_options_t, typename target_aborter_t = SurfaceReached, typename path_aborter_t = PathLimitReached>
Result<ResultType<propagator_options_t>> propagate(const BoundParameters &start, const Surface &target, const propagator_options_t &options) const Propagate track parameters - User method.
This function performs the propagation of the track parameters according to the internal implementation object until at least one abort condition is fulfilled, the destination surface is hit or the maximum number of steps/path length as given in the propagation options is reached.
- Template Parameters:
propagator_options_t – Type of the propagator options
target_aborter_t – The target aborter type to be added
path_aborter_t – The path aborter type to be added
- Parameters:
start – [in] Initial track parameters to propagate
target – [in] Target surface of to propagate to
options – [in] Propagation options
- Returns:
Propagation result containing the propagation status, final track parameters, and output of actions (if they produce any)
-
template<typename propagator_state_t>
Result<void> propagate(propagator_state_t &state) const Propagate track parameters.
This function performs the propagation of the track parameters according to the internal implementation object until at least one abort condition is fulfilled, the destination surface is hit or the maximum number of steps/path length as given in the propagation options is reached.
Note
Does not (yet) convert into the return_type of the propagation
- Template Parameters:
propagator_state_t – Type of the propagator state with options
- Parameters:
state – [inout] the propagator state object
- Returns:
Propagation result
-
template<typename BinningType>
class ProtoSurfaceMaterialT : public Acts::ISurfaceMaterial proxy to SurfaceMaterial hand over BinUtility or other suitable binning description
The ProtoSurfaceMaterial class acts as a proxy to the SurfaceMaterial to mark the layers and surfaces on which the material should be mapped on at construction time of the geometry and to hand over the granularity of of the material map with the bin Utility.
Public Functions
-
ProtoSurfaceMaterialT() = default
Constructor without binningType - homogeneous material.
-
inline explicit ProtoSurfaceMaterialT(const BinningType &binning, MappingType mappingType = MappingType::Default)
Constructor with BinningType.
- Parameters:
binning – a binning description for the material map binning
mappingType – is the type of surface mapping associated to the surface
-
ProtoSurfaceMaterialT(const ProtoSurfaceMaterialT<BinningType> &smproxy) = default
Copy constructor.
- Parameters:
smproxy – The source proxy
-
ProtoSurfaceMaterialT(ProtoSurfaceMaterialT<BinningType> &&smproxy) noexcept = default
Copy move constructor.
- Parameters:
smproxy – The source proxy
-
~ProtoSurfaceMaterialT() override = default
Destructor.
-
inline const BinningType &binning() const
Return the BinUtility.
- Returns:
Reference to the binning
-
inline virtual std::vector<AxisDirection> localAxisDirections() const final
Returns the axis directions for the local coordinate system.
- Returns:
Vector of axis directions defining the local coordinate system
-
inline virtual const MaterialSlab &materialSlab(const Vector2&) const final
Return method for full material description of the Surface - from local coordinates.
- Returns:
will return dummy material
-
const MaterialSlab &materialSlab(const Vector2 &lp) const = 0
Return method for full material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
MaterialSlab materialSlab(const Vector2 &lp, Direction pDir, MaterialUpdateMode mode) const
Return method for fully scaled material description of the Surface.
from local coordinate of the material grid
- Parameters:
lp – is the local position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
inline virtual const MaterialSlab &materialSlab(const Vector3&) const final
Return method for full material description of the Surface - from the global coordinates.
- Returns:
will return dummy material
-
const MaterialSlab &materialSlab(const Vector3 &gp) const = 0
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&) with a prior Surface::globalToLocal() call to convert the global position.
- Parameters:
gp – is the global position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
MaterialSlab materialSlab(const Vector3 &gp, Direction pDir, MaterialUpdateMode mode) const
Return method for full material description of the Surface.
from the global coordinates
- Deprecated:
Use materialSlab(const Vector2&, Direction, MaterialUpdateMode) with a prior Surface::globalToLocal() call to convert gp.
- Parameters:
gp – is the global position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
ProtoSurfaceMaterialT<BinningType> &operator=(const ProtoSurfaceMaterialT<BinningType> &smproxy) = default
Assignment operator.
- Parameters:
smproxy – The source proxy
- Returns:
Reference to this object
-
ProtoSurfaceMaterialT<BinningType> &operator=(ProtoSurfaceMaterialT<BinningType> &&smproxy) noexcept = default
Assignment move operator.
- Parameters:
smproxy – The source proxy
- Returns:
Reference to this object
-
inline virtual ProtoSurfaceMaterialT<BinningType> &scale(double) final
Scale operation - dummy implementation.
- Returns:
Reference to this object
-
inline virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream, to be overloaded by child classes.
- Parameters:
sl – is the output stream
- Returns:
The output stream
-
ProtoSurfaceMaterialT() = default
-
class RadialBounds : public Acts::DiscBounds
Class to describe the bounds for a planar DiscSurface.
By providing an argument for hphisec, the bounds can be restricted to a phi-range around the center position.
Public Types
Public Functions
-
inline explicit RadialBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor from array values.
- Parameters:
values – The bound values
-
inline explicit RadialBounds(double minR, double maxR, double halfPhi = std::numbers::pi, double avgPhi = 0.) noexcept(false)
Constructor for full disc of symmetric disc around phi=0.
- Parameters:
minR – The inner radius (0 for full disc)
maxR – The outer radius
halfPhi – The half opening angle (Pi for full angular coverage)
avgPhi – The average phi for the disc/ring sector
-
inline virtual double binningValuePhi() const final
Return a reference phi value for binning.
- Returns:
Average phi value used as binning reference
-
inline virtual double binningValueR() const final
Return a reference radius for binning.
- Returns:
Average radius value used as binning reference
-
virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const final
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const final
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For RadialBounds: returns ((rMin + rMax)/2, averagePhi) in polar coordinates
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline virtual bool coversFullAzimuth() const final
Returns true for full phi coverage.
- Returns:
True if bounds cover full azimuthal range (2π), false otherwise
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The boundary value corresponding to the requested parameter
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
inline virtual bool insideRadialBounds(double R, double tolerance = 0.) const final
Checks if this is inside the radial coverage given the a tolerance.
- Parameters:
R – Radius value to check
tolerance – Tolerance for the boundary check
- Returns:
True if radius is within radial bounds considering tolerance
-
inline virtual bool isCartesian() const final
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
inline virtual double rMax() const final
Return method for outer Radius.
- Returns:
Maximum radius value of the bounds
-
inline virtual double rMin() const final
Return method for inner Radius.
- Returns:
Minimum radius value of the bounds
-
virtual std::ostream &toStream(std::ostream &sl) const final
Outstream operator.
- Parameters:
sl – is the ostream to be dumped into
- Returns:
Reference to the output stream for chaining
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
-
inline explicit RadialBounds(const std::array<double, eSize> &values) noexcept(false)
-
class RectangleBounds : public Acts::PlanarBounds
Bounds for a rectangular, planar surface - it can be used to for rectangles that are symmetrically centered around (0./0.) and for generic shifted rectangles
Public Types
Public Functions
-
inline explicit RectangleBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from fixed size array - generic.
- Parameters:
values – The parameter values
-
inline RectangleBounds(const Vector2 &min, const Vector2 &max) noexcept(false)
Constructor - from min/max - generic.
- Parameters:
min – The left bottom corner
max – The right top corning
-
inline RectangleBounds(double halfX, double halfY) noexcept(false)
Constructor with halflength in x and y - symmetric.
- Parameters:
halfX – halflength in X
halfY – halflength in Y
-
virtual const RectangleBounds &boundingBox() const final
Bounding box parameters.
- Returns:
rectangle bounds for a bounding box
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For RectangleBounds: returns the geometric center (min + max) / 2
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The requested bound value
-
inline double halfLengthX() const
Access to the half length in X.
- Returns:
Half the width of the rectangle in X direction
-
inline double halfLengthY() const
Access to the half length in Y.
- Returns:
Half the width of the rectangle in Y direction
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – is the ostream for the dump
- Returns:
Reference to the output stream after writing
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Access method for bound values, this is a dynamically sized vector containing the parameters needed to describe these bounds.
- Returns:
of the stored values for this SurfaceBounds object
-
virtual std::vector<Vector2> vertices(unsigned int quarterSegments = 0u) const final
Return the vertices.
Note
the number of segments is ignored in this representation
- Parameters:
quarterSegments – is the number of segments used to describe curved segments in a quarter of the phi range.
- Returns:
vector for vertices in 2D
-
inline explicit RectangleBounds(const std::array<double, eSize> &values) noexcept(false)
-
class RegularSurface : public Acts::Surface
A physical surface which does not depend on the direction you look at it from.
As such it narrows the interface of
Surfaceand allows inspection without providing a global position and direction.Subclassed by Acts::ConeSurface, Acts::CylinderSurface, Acts::DiscSurface, Acts::PlaneSurface
Public Functions
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
Convert a global position to a local one this is the most generic interface, which is implemented by all surfaces.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
direction – is the direction of the local position (ignored for
RegularSurface)tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, double tolerance = s_onSurfaceTolerance) const = 0
Convert a global position to a local one.
Note
The
positionis required to be on-surface, which is indicated by theResultreturn value.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position to be converted
tolerance – is the tolerance for the on-surface check
- Returns:
Result type containing local position by value
-
bool isOnSurface(const GeometryContext &gctx, const Vector3 &position, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::None(), double tolerance = s_onSurfaceTolerance) const
The geometric onSurface method.
Geometrical check whether position is on Surface
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global position to be evaludated
boundaryTolerance – BoundaryTolerance directive for this onSurface check
tolerance – optional tolerance within which a point is considered on surface
- Returns:
boolean indication if operation was successful
-
bool isOnSurface(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::None(), double tolerance = s_onSurfaceTolerance) const
The geometric onSurface method.
Geometrical check whether position is on Surface
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global position to be evaludated
direction – global momentum direction (required for line-type surfaces)
boundaryTolerance – BoundaryTolerance directive for this onSurface check
tolerance – optional tolerance within which a point is considered on surface
- Returns:
boolean indication if operation was successful
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Local to global transformation.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
- Returns:
The global position by value
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const final
Local to global transformation.
This is the most generic interface, which is implemented by all surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
direction – global 3D momentum direction (ignored for
RegularSurface)
- Returns:
The global position by value
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector2 &lposition) const = 0
Calculate the normal vector of the surface This overload requires an on-surface local position.
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – is the local position where the normal vector is constructed
- Returns:
normal vector by value
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const final
Calculate the normal vector of the surface This overload is fully generic, fulfills the Surface interface and accepts a global position and a direction.
For
RegularSurfacethis is equivalent to the normal overload, ignoring thedirection- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – is the global position where the normal vector is constructed
direction – is the direction of the normal vector (ignored for
RegularSurface)
- Returns:
Normal vector at the given position
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &position) const = 0
Calculate the normal vector of the surface This overload accepts a global position.
- Parameters:
position – is the global position where the normal vector is constructed
gctx – The current geometry context object, e.g. alignment
- Returns:
normal vector by value
-
explicit Surface(const GeometryContext &gctx, const Surface &other, const Transform3 &shift) noexcept
Copy constructor with optional shift.
Note
copy construction invalidates the association to detector element and layer
- Parameters:
gctx – The current geometry context object, e.g. alignment
other – Source surface for copy
shift – Additional transform applied as: shift * transform
-
Surface(const Surface &other) noexcept = default
Copy constructor.
Note
copy construction invalidates the association to detector element and layer
- Parameters:
other – Source surface for copy.
-
explicit Surface(const SurfacePlacementBase &placement) noexcept
Constructor from SurfacePlacement: Element proxy.
Note
The Surface does not take any ownership over the
SurfacePlacementBaseit is expected that the user ensures the life-time of theSurfacePlacementBaseand that theSurfaceis actually owned by theSurfacePlacementBaseinstance- Parameters:
placement – Reference to the surface placement
-
explicit Surface(const Transform3 &transform = Transform3::Identity())
Constructor with Transform3 as a shared object.
Note
also acts as default constructor
- Parameters:
transform – Transform3 positions the surface in 3D global space
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const final
-
template<typename T, typename E = std::error_code>
class Result Class which encapsulates either a valid result, or an error.
- Template Parameters:
T – The valid result value
E – The error, defaults to
std::error_code
Public Types
Public Functions
-
Result() = delete
Default construction is disallowed.
-
inline Result(Result<T, E> &&other) noexcept
Move construction is allowed.
- Parameters:
other – The other result instance to move from
- template<typename T2> inline Result (T2 value) noexcept requires(!std
Constructor from arbitrary value This constructor allows construction from any value.
This constructor is only enabled if T and E are unambiguous, meaning they cannot be implicitly converted and there is T cannot be constructed from E and vice-versa. This means that when this is invoked, the value can be propagated to the underlying variant, and the assignment will be correct, and error will be an error, and a value will be a value.
Note
If T and E are ambiguous, use the
successandfailurestatic factory methods.- Template Parameters:
T2 – Type of the potential assignment
- Parameters:
value – The potential value, could be an actual valid value or an error.
-
inline E error() && noexcept
Returns the error by-value.
Note
If
res.ok()this method will abort (noexcept)- Returns:
The error
-
inline E &error() & noexcept
Returns a reference to the error stored in the result.
Note
If
res.ok()this method will abort (noexcept)- Returns:
Reference to the error
-
inline const E &error() const & noexcept
Returns a reference to the error stored in the result.
Note
If
res.ok()this method will abort (noexcept)- Returns:
Reference to the error
-
inline bool ok() const noexcept
Checks whether this result contains a valid value, and no error.
- Returns:
bool Whether result contains an error or not.
-
inline const T &operator*() const noexcept
Returns a reference into the variant to the valid value.
Note
If
!res.ok(), this method will abort (noexcept)- Returns:
Reference to value stored in the variant.
-
inline T &operator*() noexcept
Returns a reference into the variant to the valid value.
Note
If
!res.ok(), this method will abort (noexcept)- Returns:
Reference to value stored in the variant.
-
inline const T *operator->() const noexcept
Allows to access members of the stored object with
res->foosimilar tostd::optional.Note
If
!res.ok(), this method will abort (noexcept)- Returns:
Pointer to value stored in the variant.
-
inline T *operator->() noexcept
Allows to access members of the stored object with
res->foosimilar tostd::optional.Note
If
!res.ok(), this method will abort (noexcept)- Returns:
Pointer to value stored in the variant.
-
inline Result<T, E> &operator=(Result<T, E> &&other) noexcept
Move assignment is allowed.
- Parameters:
other – The other result instance, rvalue reference
- Returns:
The assigned instance
- template<typename T2> inline Result< T, E > & operator= (T2 value) noexcept requires(!std
Assignment operator from arbitrary value This operator allows construction from any value.
The same rules as for the
Result(T2 value)constructor apply.- Template Parameters:
T2 – Type of the potential assignment
- Parameters:
value – The potential value, could be an actual valid value or an error.
- Returns:
The assigned instance
-
inline T &value() &
Retrieves the valid value from the result object.
Note
This is the lvalue version, returns a reference to the value
- Returns:
The valid value as a reference
-
inline const T &value() const &
Retrieves the valid value from the result object.
Note
This is the lvalue version, returns a reference to the value
- Returns:
The valid value as a reference
- template<typename U> inline std::conditional_t< std::is_reference_v< U >, const T &, T > value_or (U &&v) const &requires(std
Retrieves the valid value from the result object, or returns a default value if no valid value exists.
Note
This is the lvalue version.
Note
This function always returns by value.
- Parameters:
v – [in] The default value to use if no valid value exists.
- Returns:
Either the valid value, or the given substitute.
Public Members
- template<typename C> auto transform(C &&callable) const &requires std void checkValueAccess () const
Transforms the value contained in this result.
Applying a function
fto a valid valuexreturnsf(x), while applyingfto an invalid value returns another invalid value.Applying a function
fto a valid valuexreturnsf(x), while applyingfto an invalid value returns another invalid value.This function takes a function
fand, if this result contains a valid valuex, returnsf(x). If the type ofxisT, thenfis expected to accept typeTand returnResult<U>. In this case,transformwould return the unhelpful typeResult<Result<U>>, soand_thenstrips away the outer layer to returnResult<U>. If the value is invalid, this returns an invalid value inResult<U>.This function takes a function
fand, if this result contains a valid valuex, returnsf(x). If the type ofxisT, thenfis expected to accept typeTand returnResult<U>. In this case,transformwould return the unhelpful typeResult<Result<U>>, soand_thenstrips away the outer layer to returnResult<U>. If the value is invalid, this returns an invalid value inResult<U>.Note
This is the lvalue version.
Note
This functions is
fmapon the functor inAofResult<A, E>.Note
This is the rvalue version.
Note
This functions is
fmapon the functor inAofResult<A, E>.Note
This is the lvalue version.
Note
This functions is
>>=on the functor inAofResult<A, E>.Note
This is the rvalue version.
Note
This functions is
>>=on the functor inAofResult<A, E>.- Param callable:
[in] The transformation function to apply.
- Return:
The modified valid value if exists, or an error otherwise. Transforms the value contained in this result.
- Param callable:
[in] The transformation function to apply.
- Return:
The modified valid value if exists, or an error otherwise. Bind a function to this result monadically.
- Param callable:
[in] The transformation function to apply.
- Return:
The modified valid value if exists, or an error otherwise. Bind a function to this result monadically.
- Param callable:
[in] The transformation function to apply.
- Return:
The modified valid value if exists, or an error otherwise.
Warning
doxygenclass: Cannot find class “Acts::SeedFilter” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygenclass: Cannot find class “Acts::SinglyChargedParticleHypothesis” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
class SolenoidBField : public Acts::MagneticFieldProvider
Analytical solenoid magnetic field implementation.
Concept
This class implements a multi-coil solenoid magnetic field. On every call, the field is evaluated at that exact position. The field has radially symmetry, the field vectors point in +z direction. The config exposes a target field value in the center. This value is used to empirically determine a scale factor which reproduces this field value in the center.
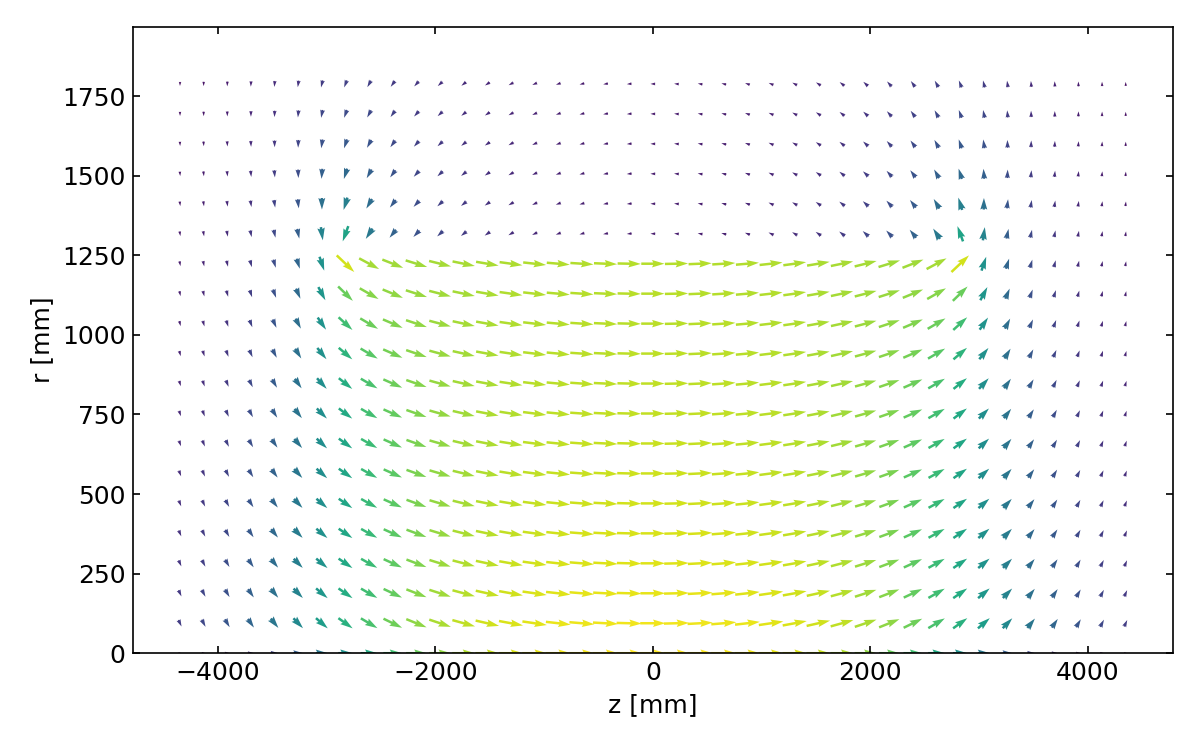
Implementation
\(E_1(k^2)\) = complete elliptic integral of the 1st kind
\(E_2(k^2)\) = complete elliptic integral of the 2nd kind
\(E_1(k^2)\) and \(E_2(k^2)\) are usually indicated as \(K(k^2)\) and \(E(k^2)\) in literature, respectively
\[ E_1(k^2) = \int_0^{\pi/2} \left( 1 - k^2 \sin^2{\theta} \right )^{-1/2} \mathrm{d}\theta \]\[ E_2(k^2) = \int_0^{\pi/2}\sqrt{1 - k^2 \sin^2{\theta}} \mathrm{d}\theta \]\(k^2\) is a function of the point \((r, z)\) and of the radius of the coil \(R\)
\[ k^2 = \frac{4Rr}{(R+r)^2 + z^2} \]
Using these, you can evaluate the two components \(B_r\) and \(B_z\) of the magnetic field:
\[ B_r(r, z) = \frac{\mu_0 I}{4\pi} \frac{kz}{\sqrt{Rr^3}} \left[ \left(\frac{2-k^2}{2-2k^2}\right)E_2(k^2) - E_1(k^2) \right ] \]\[ B_z(r,z) = \frac{\mu_0 I}{4\pi} \frac{k}{\sqrt{Rr}} \left[ \left( \frac{(R+r)k^2-2r}{2r(1-k^2)} \right ) E_2(k^2) + E_1(k^2) \right ] \]In the implementation the factor of \((\mu_0\cdot I)\) is defined to be a scaling factor. It is evaluated and defined as the magnetic field in the center of the coil, i.e. the scale set in Acts::SolenoidBField::Config::bMagCenter.
Note
A configuration of
roughly corresponds to the solenoid wrapping the Inner Detector in ATLAS!SolenoidBField::Config cfg; cfg.length = 5.8_m; cfg.radius = (2.56 + 2.46) * 0.5 * 0.5_m; cfg.nCoils = 1154; cfg.bMagCenter = 2_T; SolenoidBField bField(cfg);
Warning
As the evaluation of \(E_1(k^2)\) and \(E_2(k^2)\) is slow. The Acts::InterpolatedBFieldMap easily outperforms Acts::SolenoidBField. A helper is provided that builds a map from the analytical implementation and is much faster to lookup: Acts::solenoidFieldMap.
Public Functions
-
explicit SolenoidBField(Config config)
the constructor with a shared pointer
Note
since it is a shared field, we enforce it to be const
- Template Parameters:
bField – is the shared BField to be stored
- Parameters:
config – Configuration struct containing solenoid parameters
-
Vector2 getField(const Vector2 &position) const
Retrieve magnetic field value in local (r,z) coordinates.
- Parameters:
position – [in] local 2D position
- Returns:
Magnetic field vector in local (r,z) coordinates
-
Vector3 getField(const Vector3 &position) const
Get the B field at a position.
- Parameters:
position – The position to query at
- Returns:
Magnetic field vector in global coordinates
-
virtual Result<Vector3> getField(const Vector3 &position, MagneticFieldProvider::Cache &cache) const override
Retrieve magnetic field value at a given location.
Requires an instance of Acts::MagneticFieldProvider::Cache created through makeCache.
- Parameters:
position – [in] global 3D position for the lookup
cache – [inout] Field provider specific cache object
- Returns:
magnetic field vector at given position
-
virtual MagneticFieldProvider::Cache makeCache(const MagneticFieldContext &mctx) const override
Make an opaque cache for the magnetic field.
Instructs the specific implementation to generate a Acts::MagneticFieldProvider::Cache instance for magnetic field lookup.
- Parameters:
mctx – The magnetic field context to generate cache for
- Returns:
Cache The opaque cache object
-
struct Cache
Cache payload for magnetic field evaluation.
Public Functions
-
inline explicit Cache(const MagneticFieldContext&)
Constructor with magnetic field context.
-
inline explicit Cache(const MagneticFieldContext&)
-
struct Config
Config struct for the SolenoidBfield.
Public Members
-
double bMagCenter
The target magnetic field strength at the center.
This will be used to scale coefficients
-
double length
Extent of the solenoid in z.
It goes from -length/2 to +length/2 by convention
-
std::size_t nCoils
The number of coils that make up the solenoid.
-
double radius
Radius at which the coils are located.
-
double bMagCenter
-
class SourceLink
Type-erased source link wrapper.
Public Functions
-
SourceLink(const SourceLink &other) = default
Copy constructor.
- Parameters:
other – Source link to copy from
-
SourceLink(SourceLink &&other) = default
Move constructor.
- Parameters:
other – Source link to move from
- template<typename T> inline explicit SourceLink (T &&upstream) requires(!std
Constructor from concrete source link.
- Template Parameters:
T – The source link type
- Parameters:
upstream – The upstream source link to store
-
template<typename T>
inline T &get() Concrete source link class getter.
- Template Parameters:
T – The source link type to retrieve
- Returns:
Reference to the stored source link
-
template<typename T>
inline const T &get() const Concrete source link class getter, const version.
- Template Parameters:
T – The source link type to retrieve
- Returns:
Const reference to the stored source link
-
template<typename T>
inline T *getPtr() Concrete source link pointer getter.
- Template Parameters:
T – The source link type to retrieve
- Returns:
Pointer to the stored source link, or nullptr if the type doesn’t match or the SourceLink is empty
-
template<typename T>
inline const T *getPtr() const Concrete source link pointer getter, const version.
- Template Parameters:
T – The source link type to retrieve
- Returns:
Const pointer to the stored source link, or nullptr if the type doesn’t match or the SourceLink is empty
-
SourceLink &operator=(const SourceLink &other) = default
Copy assignment operator.
- Parameters:
other – Source link to copy from
- Returns:
Reference to this source link
-
SourceLink &operator=(SourceLink &&other) = default
Move assignment operator.
- Parameters:
other – Source link to move from
- Returns:
Reference to this source link
-
SourceLink(const SourceLink &other) = default
-
class StraightLineStepper
straight line stepper based on Surface intersection
The straight line stepper is a simple navigation stepper to be used to navigate through the tracking geometry. It can be used for simple material mapping, navigation validation
Public Types
-
using BField = NullBField
Type alias for magnetic field (null field for straight line propagation)
-
using BoundParameters = BoundTrackParameters
Type alias for bound track parameters.
-
using BoundState = std::tuple<BoundParameters, Jacobian, double>
Type alias for bound state containing parameters, jacobian, and path length.
-
using Covariance = BoundMatrix
Type alias for covariance matrix.
-
using Jacobian = BoundMatrix
Type alias for transport jacobian matrix.
Public Functions
-
inline double absoluteMomentum(const State &state) const
Absolute momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Absolute momentum magnitude
-
Result<BoundState> boundState(State &state, const Surface &surface, bool transportCov = true, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Create and return the bound state at the current position.
It does not check if the transported state is at the surface, this needs to be guaranteed by the propagator
- Parameters:
state – [in] State that will be presented as
BoundStatesurface – [in] The surface to which we bind the state
transportCov – [in] Flag steering covariance transport
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
- Returns:
A bound state:
the parameters at the surface
the stepwise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline double charge(const State &state) const
Charge access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Electric charge of the particle
-
BoundState curvilinearState(State &state, bool transportCov = true) const
Create and return a curvilinear state at the current position.
This creates a curvilinear state.
- Parameters:
state – [in] State that will be presented as
CurvilinearStatetransportCov – [in] Flag steering covariance transport
- Returns:
A curvilinear state:
the curvilinear parameters at given position
the stepweise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline Vector3 direction(const State &state) const
Momentum direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Current normalized direction vector
-
inline Result<Vector3> getField(State&, const Vector3&) const
Get the field for the stepping, this gives back a zero field.
- Returns:
Always returns zero magnetic field vector for straight-line propagation
-
inline double getStepSize(const State &state, ConstrainedStep::Type stype) const
Get the step size.
- Parameters:
state – [in] The stepping state (thread-local cache)
stype – [in] The step size type to be returned
- Returns:
Current step size for the specified constraint type
-
void initialize(State &state, const BoundParameters &par) const
Initialize the stepper state from bound track parameters.
- Parameters:
state – The stepper state to initialize
par – The bound track parameters to initialize from
-
void initialize(State &state, const BoundVector &boundParams, const std::optional<BoundMatrix> &cov, ParticleHypothesis particleHypothesis, const Surface &surface) const
Initialize the stepper state from bound parameters and components.
- Parameters:
state – The stepper state to initialize
boundParams – The bound parameter vector
cov – Optional covariance matrix
particleHypothesis – The particle hypothesis (mass, charge, etc.)
surface – The reference surface
-
State makeState(const Options &options) const
Create a stepper state from propagation options.
- Parameters:
options – The propagation options
- Returns:
A new stepper state initialized with the provided options
-
inline Vector3 momentum(const State &state) const
Momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Current momentum vector
-
inline std::string outputStepSize(const State &state) const
Output the Step Size - single component.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
- Returns:
String representation of the current step size
-
inline const ParticleHypothesis &particleHypothesis(const State &state) const
Particle hypothesis.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Reference to the particle hypothesis used
-
inline Vector3 position(const State &state) const
Global particle position accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Current global position vector
-
inline bool prepareCurvilinearState(State &state) const
If necessary fill additional members needed for curvilinearState.
Compute path length derivatives in case they have not been computed yet, which is the case if no step has been executed yet.
- Parameters:
state – [inout] The stepping state (thread-local cache)
- Returns:
true if nothing is missing after this call, false otherwise.
-
inline double qOverP(const State &state) const
QoP direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Charge over momentum (q/p) value
-
inline void releaseStepSize(State &state, ConstrainedStep::Type stype) const
Release the Step size.
- Parameters:
state – [inout] The stepping state (thread-local cache)
stype – [in] The step size type to be released
-
inline Result<double> step(State &state, Direction propDir, const IVolumeMaterial *material) const
Perform a straight line propagation step.
Note
The state contains the desired step size. It can be negative during backwards track propagation.
- Parameters:
state – [inout] State of the stepper
propDir – is the direction of propagation
material – is the optional volume material we are stepping through.
- Returns:
the result of the step
-
inline double time(const State &state) const
Time access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
The time coordinate from the free parameters vector
-
void transportCovarianceToBound(State &state, const Surface &surface, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state - for the moment a dummy method.
Note
no check is done if the position is actually on the surface
- Template Parameters:
surface_t – the surface type - ignored here
- Parameters:
state – [inout] The stepper state
surface – [in] is the surface to which the covariance is forwarded to
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
-
void transportCovarianceToCurvilinear(State &state) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state - for the moment a dummy method.
- Parameters:
state – [inout] State of the stepper
-
void update(State &state, const FreeVector &freeParams, const BoundVector &boundParams, const Covariance &covariance, const Surface &surface) const
Method to update a stepper state to the some parameters.
- Parameters:
state – [inout] State object that will be updated
freeParams – [in] Free parameters that will be written into
stateboundParams – [in] Corresponding bound parameters used to update jacToGlobal in
statecovariance – [in] Covariance that will be written into
statesurface – [in] The surface used to update the jacToGlobal
-
void update(State &state, const Vector3 &uposition, const Vector3 &udirection, double qop, double time) const
Method to update the stepper state.
- Parameters:
state – [inout] State object that will be updated
uposition – [in] the updated position
udirection – [in] the updated direction
qop – [in] the updated qop value
time – [in] the updated time value
Update step size.
It checks the status to the reference surface & updates the step size accordingly
- Parameters:
state – [in,out] The stepping state (thread-local cache)
target – [in] The NavigationTarget
direction – [in] The propagation direction
stype – [in] The step size type to be set
-
inline void updateStepSize(State &state, double stepSize, ConstrainedStep::Type stype) const
Update step size - explicitly with a double.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stepSize – [in] The step size value
stype – [in] The step size type to be set
-
inline IntersectionStatus updateSurfaceStatus(State &state, const Surface &surface, std::uint8_t index, Direction navDir, const BoundaryTolerance &boundaryTolerance, double surfaceTolerance, ConstrainedStep::Type stype, const Logger &logger = getDummyLogger()) const
Update surface status.
This method intersects the provided surface and update the navigation step estimation accordingly (hence it changes the state). It also returns the status of the intersection to trigger onSurface in case the surface is reached.
- Parameters:
state – [inout] The stepping state (thread-local cache)
surface – [in] The surface provided
index – [in] The surface intersection index
navDir – [in] The navigation direction
boundaryTolerance – [in] The boundary check for this status update
surfaceTolerance – [in] Surface tolerance used for intersection
stype – [in] The step size type to be set
logger – [in] A logger instance
- Returns:
Status of the intersection indicating whether surface was reached
-
struct Config
-
struct Options : public Acts::StepperPlainOptions
Configuration options for straight line propagation.
Public Functions
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
Constructor from geometry and magnetic field contexts.
- Parameters:
gctx – The geometry context
mctx – The magnetic field context
-
inline void setPlainOptions(const StepperPlainOptions &options)
Set plain stepper options.
- Parameters:
options – The plain options to set
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
-
struct State
State for track parameter propagation.
Public Functions
Public Members
-
Covariance cov = Covariance::Zero()
Covariance matrix for track parameter uncertainties.
-
bool covTransport = false
Boolean to indicate if you need covariance transport.
-
FreeVector derivative = FreeVector::Zero()
The propagation derivative.
-
BoundToFreeMatrix jacToGlobal = BoundToFreeMatrix::Zero()
Jacobian from local to the global frame.
-
FreeMatrix jacTransport = FreeMatrix::Identity()
Pure transport jacobian part from runge kutta integration.
-
std::size_t nSteps = 0
Total number of performed steps.
-
std::size_t nStepTrials = 0
Totoal number of attempted steps.
-
FreeVector pars = FreeVector::Zero()
Internal free vector parameters.
-
ParticleHypothesis particleHypothesis = ParticleHypothesis::pion()
Particle hypothesis.
-
double pathAccumulated = 0.
accumulated path length state
-
double previousStepSize = 0.
Previous step size for overstep estimation (ignored for straight line stepper)
-
StepperStatistics statistics
Statistics of the stepper.
-
ConstrainedStep stepSize
adaptive step size of the runge-kutta integration
-
Covariance cov = Covariance::Zero()
-
using BField = NullBField
-
class StrawSurface : public Acts::LineSurface
Class for a StrawSurface in the TrackingGeometry to describe dirft tube and straw like detectors.
Public Functions
-
inline virtual std::string name() const final
Return properly formatted class name for screen output */.
- Returns:
String representation of the surface type name
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int quarterSegments) const final
Return a Polyhedron for the surfaces.
- Parameters:
gctx – The current geometry context object, e.g. alignment
quarterSegments – is the number of segments used to describe curved segments in a quarter of the phi range. If it is 1, then only the extrema points in phi are inserted next to the segment corners.
- Returns:
A list of vertices and a face/facett description of it
-
inline virtual SurfaceType type() const final
Return the surface type.
- Returns:
Surface type identifier for straw surfaces
-
inline virtual std::string name() const final
-
class Surface : public virtual Acts::GeometryObject, public std::enable_shared_from_this<Surface>
Abstract Base Class for tracking surfaces.
The Surface class builds the core of the Acts Tracking Geometry. All other geometrical objects are either extending the surface or are built from it.
Surfaces are either owned by Detector elements or the Tracking Geometry, in which case they are not copied within the data model objects.
Subclassed by Acts::LineSurface, Acts::RegularSurface
Public Types
Public Functions
-
~Surface() noexcept override
-
AlignmentToBoundMatrix alignmentToBoundDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const FreeVector &pathDerivative) const
The derivative of bound track parameters w.r.t.
alignment parameters of its reference surface (i.e. local frame origin in global 3D Cartesian coordinates and its rotation represented with extrinsic Euler angles)
- Parameters:
gctx – The current geometry context object, e.g. alignment change of alignment parameters
position – global 3D position
direction – global 3D momentum direction
pathDerivative – is the derivative of free parameters w.r.t. path length
- Returns:
Derivative of bound track parameters w.r.t. local frame alignment parameters
-
virtual AlignmentToPathMatrix alignmentToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Calculate the derivative of path length at the geometry constraint or point-of-closest-approach w.r.t.
alignment parameters of the surface (i.e. local frame origin in global 3D Cartesian coordinates and its rotation represented with extrinsic Euler angles)
Note
Re-implementation is needed for surface whose intersection with track is not its local xy plane, e.g. LineSurface, CylinderSurface and ConeSurface
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Derivative of path length w.r.t. the alignment parameters
-
void assignIsSensitive(bool isSensitive)
Assign whether the surface is sensitive.
- Parameters:
isSensitive – Boolean flag to set sensitivity
- Throws:
logic_error – if the surface is associated to a detector element
Assign the surface material description.
The material is usually derived in a complicated way and loaded from a framework given source. As various surfaces may share the same source this is provided by a shared pointer
- Parameters:
material – Material description associated to this surface
-
void assignSurfacePlacement(const SurfacePlacementBase &placement)
Assign a placement object which may dynamically align the surface in space.
- Parameters:
placement – Placement object defining the surface’s position
-
void assignThickness(double thick)
Assign the thickness of the surface in the orthogonal dimension.
- Parameters:
thick – Thickness parameter to assign (>=0)
-
const Layer *associatedLayer() const
Return method for the associated Layer in which the surface is embedded.
- Returns:
Layer by plain pointer, can be nullptr
-
void associateLayer(const Layer &lay)
Set Associated Layer Many surfaces can be associated to a Layer, but it might not be known yet during construction of the layer, this can be set afterwards.
- Parameters:
lay – the assignment Layer by reference
-
virtual const SurfaceBounds &bounds() const = 0
Return method for SurfaceBounds.
- Returns:
SurfaceBounds by reference
-
virtual BoundToFreeMatrix boundToFreeJacobian(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Calculate the jacobian from local to global which the surface knows best, hence the calculation is done here.
Note
In principle, the input could also be a free parameters vector as it could be transformed to a bound parameters. But the transform might fail in case the parameters is not on surface. To avoid the check inside this function, it takes directly the bound parameters as input (then the check might be done where this function is called).
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Jacobian from local to global
-
virtual Vector3 center(const GeometryContext &gctx) const
Return method for the surface center.
Note
the center is always recalculated in order to not keep a cache
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
center position by value
-
virtual Vector2 closestPointOnBoundary(const Vector2 &lposition, const SquareMatrix2 &metric) const
Calculates the closest point on the boundary of the surface to a given point in local coordinates.
- Parameters:
lposition – The local position to check
metric – The metric to use for the calculation
- Returns:
The closest point on the boundary of the surface
-
virtual double distanceToBoundary(const Vector2 &lposition) const
Calculates the distance to the boundary of the surface from a given point in local coordinates.
- Parameters:
lposition – The local position to check
- Returns:
The distance to the boundary of the surface
-
virtual FreeToBoundMatrix freeToBoundJacobian(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Calculate the jacobian from global to local which the surface knows best, hence the calculation is done here.
Note
It assumes the input free parameters is on surface, hence no onSurface check is done inside this function.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Jacobian from global to local
-
virtual FreeToPathMatrix freeToPathDerivative(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Calculate the derivative of path length at the geometry constraint or point-of-closest-approach w.r.t.
free parameters. The calculation is identical for all surfaces where the reference frame does not depend on the direction
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Derivative of path length w.r.t. free parameters
Retrieve a
std::shared_ptrfor this surface (non-const version)Note
Will error if this was not created through the
makeSharedfactory since it needs access to the original reference. In C++14 this is undefined behavior (but most likely implemented as abad_weak_ptrexception), in C++17 it is defined as that exception.Note
Only call this if you need shared ownership of this object.
- Returns:
The shared pointer
Retrieve a
std::shared_ptrfor this surface (const version)Note
Will error if this was not created through the
makeSharedfactory since it needs access to the original reference. In C++14 this is undefined behavior, but most likely implemented as abad_weak_ptrexception, in C++17 it is defined as that exception.Note
Only call this if you need shared ownership of this object.
- Returns:
The shared pointer
-
virtual Result<Vector2> globalToLocal(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, double tolerance = s_onSurfaceTolerance) const = 0
Global to local transformation Generalized global to local transformation for the surface types.
Since some surface types need the global momentum/direction to resolve sign ambiguity this is also provided
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
direction – global 3D momentum direction
tolerance – optional tolerance within which a point is considered valid on surface
- Returns:
a Result<Vector2> which can be !ok() if the operation fails
-
bool hasMaterial() const
Check if the surface has an associated material description.
- Returns:
True if the surface has an associated material, false otherwise
-
virtual bool insideBounds(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::None()) const
The insideBounds method for local positions.
- Parameters:
lposition – The local position to check
boundaryTolerance – BoundaryTolerance directive for this onSurface check
- Returns:
boolean indication if operation was successful
-
virtual MultiIntersection3D intersect(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::Infinite(), double tolerance = s_onSurfaceTolerance) const = 0
Straight line intersection schema from position/direction.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position to start from
direction – The direction at start
boundaryTolerance – the BoundaryTolerance
tolerance – the tolerance used for the intersection
- Returns:
MultiIntersection3Dintersection object
-
bool isAlignable() const
Returns whether the Surface is alignable.
- Returns:
True if the surface is alignable
-
bool isOnSurface(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction, const BoundaryTolerance &boundaryTolerance = BoundaryTolerance::None(), double tolerance = s_onSurfaceTolerance) const
The geometric onSurface method.
Geometrical check whether position is on Surface
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global position to be evaludated
direction – global momentum direction (required for line-type surfaces)
boundaryTolerance – BoundaryTolerance directive for this onSurface check
tolerance – optional tolerance within which a point is considered on surface
- Returns:
boolean indication if operation was successful
-
bool isSensitive() const
Returns whether the Surface is sensitive.
- Returns:
True if the surface is sensitive
-
virtual Matrix<2, 3> localCartesianToBoundLocalDerivative(const GeometryContext &gctx, const Vector3 &position) const = 0
Calculate the derivative of bound track parameters local position w.r.t.
position in local 3D Cartesian coordinates
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position of the parameters in global
- Returns:
Derivative of bound local position w.r.t. position in local 3D cartesian coordinates
-
virtual Vector3 localToGlobal(const GeometryContext &gctx, const Vector2 &lposition, const Vector3 &direction) const = 0
Local to global transformation Generalized local to global transformation for the surface types.
Since some surface types need the global momentum/direction to resolve sign ambiguity this is also provided
- Parameters:
gctx – The current geometry context object, e.g. alignment
lposition – local 2D position in specialized surface frame
direction – global 3D momentum direction
- Returns:
The global position by value
-
const Transform3 &localToGlobalTransform(const GeometryContext &gctx) const
Return method for the surface Transform3 by reference In case a detector element is associated the surface transform is just forwarded to the detector element in order to keep the (mis-)alignment cache cetrally handled.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
the contextual transform
-
virtual const MaterialSlab &materialSlab(const Vector2 &lp) const
Return method for full material description of the Surface.
from local coordinate on the surface
- Parameters:
lp – is the local position used for the (eventual) lookup
- Returns:
const MaterialSlab
-
virtual MaterialSlab materialSlab(const Vector2 &lp, Direction pDir, MaterialUpdateMode mode) const
Return method for fully scaled material description of the Surface.
from local coordinate on the surface
- Parameters:
lp – is the local position used for the (eventual) lookup
pDir – is the positive direction through the surface
mode – is the material update directive
- Returns:
MaterialSlab
-
virtual std::string name() const = 0
Return properly formatted class name.
- Returns:
The surface class name as a string
-
virtual Vector3 normal(const GeometryContext &gctx, const Vector3 &pos, const Vector3 &direction) const = 0
Return the surface normal at a given
positionanddirection.This method is fully generic, and valid for all surface types.
Note
For some surface types, the
directionis ignored, but it is not safe to pass in a zero vector!- Parameters:
gctx – The current geometry context object, e.g. alignment
pos – The position at which to calculate the normal
direction – The direction at which to calculate the normal
- Returns:
The normal vector at the given position and direction
-
Surface &operator=(const Surface &other) noexcept = default
Assignment operator.
Note
copy construction invalidates the association to detector element and layer
- Parameters:
other – Source surface for the assignment
- Returns:
Reference to this surface after assignment
-
bool operator==(const Surface &other) const
Comparison (equality) operator The strategy for comparison is (a) first pointer comparison (b) then type comparison (c) then bounds comparison (d) then transform comparison.
- Parameters:
other – source surface for the comparison
- Returns:
True if surfaces are equal, false otherwise
-
virtual double pathCorrection(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const = 0
Calculation of the path correction for incident.
Note
The
positionis either ignored, or it is coerced to be on the surface, depending on the surface type.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position
direction – global 3D momentum direction
- Returns:
Path correction with respect to the nominal incident.
-
virtual Polyhedron polyhedronRepresentation(const GeometryContext &gctx, unsigned int quarterSegments = 2u) const = 0
Return a Polyhedron for surface objects.
Note
In order to symmetrize the code between sectoral and closed cylinders in case of closed cylinders, both (-pi, pi) are given as separate vertices
Note
An internal surface transform can invalidate the extrema in the transformed space
- Parameters:
gctx – The current geometry context object, e.g. alignment
quarterSegments – The number of segemtns to approximate a 0.5*pi sector, which represents a quarter of the full circle
- Returns:
A list of vertices and a face/facett description of it
-
virtual RotationMatrix3 referenceFrame(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Return method for the reference frame This is the frame in which the covariance matrix is defined (specialized by all surfaces)
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – global 3D position - considered to be on surface but not inside bounds (check is done)
direction – global 3D momentum direction (optionally ignored)
- Returns:
RotationMatrix3 which defines the three axes of the measurement frame
-
const ISurfaceMaterial *surfaceMaterial() const
Return method for the associated Material to this surface.
- Returns:
SurfaceMaterial as plain pointer, can be nullptr
Return method for the shared pointer to the associated Material.
- Returns:
SurfaceMaterial as shared_pointer, can be nullptr
-
const SurfacePlacementBase *surfacePlacement() const
Return the associated surface placement if there is any.
- Returns:
Pointer to the surface placement, can be nullptr
-
double thickness() const
Return the thickness of the surface in the normal direction.
- Returns:
The surface thickness
-
inline GeometryContextOstreamWrapper<Surface> toStream(const GeometryContext &gctx) const
Helper method for printing: the returned object captures the surface and the geometry context and will print the surface.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
The wrapper object for printing
-
std::string toString(const GeometryContext &gctx) const
Output into a std::string.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
String representation of the surface
-
virtual SurfaceType type() const = 0
Return method for the Surface type to avoid dynamic casts.
- Returns:
The surface type enumeration value
-
void visualize(IVisualization3D &helper, const GeometryContext &gctx, const ViewConfig &viewConfig = s_viewSurface) const
Visualize the surface for debugging and inspection.
- Parameters:
helper – Visualization helper for 3D rendering
gctx – Geometry context for coordinate transformations
viewConfig – Visual configuration (color, style, etc.)
Public Static Functions
Factory for producing memory managed instances of Surface.
Will forward all parameters and will attempt to find a suitable constructor.
- Parameters:
args – Constructor arguments to forward to surface creation
- Returns:
Shared pointer to the created surface instance
Public Static Attributes
-
static constexpr std::array<std::string_view, Surface::SurfaceType::Other + 1> s_surfaceTypeNames = {"Cone", "Cylinder", "Disc", "Perigee", "Plane", "Straw", "Curvilinear", "Other"}
Helper strings for screen output.
Friends
- friend struct GeometryContextOstreamWrapper< Surface >
-
friend std::ostream &operator<<(std::ostream &os, SurfaceType type)
-
~Surface() noexcept override
-
class SurfaceArray
Provides Surface binning in 2 dimensions.
Uses
Gridunder the hood to implement the storage and lookup Contains a lookup struct which talks to theGridand performs utility actions. This struct needs to be initialised externally and passed toSurfaceArrayon construction.Public Functions
Constructor to create a surface grid lookup for a given representative surface, tolerance, and axes.
- Parameters:
gctx – The current geometry context object, e.g. alignment
surfaces – The input vector of surfaces that will be accessible through this SurfaceArray.
representative – The surface which is used as representative
tolerance – The tolerance used for intersection checks
axes – The axes used for the grid
maxNeighborDistance – Maximum next neighbor distance to be included in neighbor lookups
-
SurfaceArray(const SurfaceArray &other) = delete
- Parameters:
other – the other SurfaceArray to copy from
Constructor with a single surface.
- Parameters:
srf – The one and only surface
-
SurfaceArray(SurfaceArray &&other) noexcept
- Parameters:
other – the other SurfaceArray to move from
-
~SurfaceArray()
-
std::span<const Surface*const> at(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Get all surfaces in bin given by position
pos.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – the lookup position
direction – the lookup direction
- Returns:
span of surface pointers of the bin at that position
-
std::span<const Surface*const> at(std::size_t bin) const
Get all surfaces in bin given by the global bin index.
- Parameters:
bin – the global bin index
- Returns:
span of surface pointers of the bin at that position
-
std::vector<AxisDirection> binningValues() const
The binning values described by this surface grid lookup.
They are in order of the axes
- Returns:
Vector of axis directions for binning
-
std::vector<const IAxis*> getAxes() const
Get vector of axes spanning the grid as
AnyAxis.Note
The axes in the vector are copies. Only use for introspection and querying.
- Returns:
vector of
AnyAxis
-
Vector3 getBinCenter(std::size_t bin) const
Get the center of the bin identified by global bin index
bin.- Parameters:
bin – the global bin index
- Returns:
Center position of the bin in global coordinates
-
bool isValidBin(std::size_t bin) const
Checks if global bin is valid.
Note
Valid means that the index points to a bin which is not a under or overflow bin or out of range in any axis.
- Parameters:
bin – the global bin index
- Returns:
bool if the bin is valid
-
std::uint8_t maxNeighborDistance() const
Get the maximum neighbor distance that is supported by this lookup.
This is used to determine how many neighbors to include in neighbor lookups.
- Returns:
Maximum neighbor distance
-
std::span<const Surface*const> neighbors(const GeometryContext &gctx, const Vector3 &position, const Vector3 &direction) const
Get all surfaces in bin at
posand its neighbors.- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position to lookup
direction – The direction to lookup
- Returns:
span of surface pointers of neighbors and nominal
-
std::span<const Surface*const> neighbors(std::array<std::size_t, 2> gridIndices, std::uint8_t neighborDistance) const
Get all surfaces in bin given by local grid indices and neighbor distance.
- Parameters:
gridIndices – the local grid indices
neighborDistance – the neighbor distance to include in the lookup
- Returns:
span of surface pointers of the bin at that position and its neighbors
-
std::array<std::size_t, 2> numLocalBins() const
Get the number of local bins in each dimension.
This is used to determine the size of the grid for neighbor lookups.
- Returns:
Array of number of local bins in each dimension
-
SurfaceArray &operator=(const SurfaceArray &other) = delete
- Parameters:
other – the other SurfaceArray to copy-assign from
- Returns:
reference to this SurfaceArray
-
SurfaceArray &operator=(SurfaceArray &&other) noexcept
- Parameters:
other – the other SurfaceArray to move-assign from
- Returns:
reference to this SurfaceArray
-
std::size_t size() const
Get the size of the underlying grid structure including under/overflow bins.
- Returns:
the size
-
const Surface *surfaceRepresentation() const
Get the representative surface used for this surface array.
- Returns:
Surface pointer
-
inline const std::vector<const Surface*> &surfaces() const
Get all surfaces attached to this
SurfaceArray.Note
This does not reflect the actual state of the grid. It only returns what was given in the constructor, without any checks if that is actually what’s in the grid.
- Returns:
Reference to vector of all surfaces
-
std::ostream &toStream(const GeometryContext &gctx, std::ostream &sl) const
Get string representation of this
SurfaceArray.- Parameters:
gctx – The current geometry context object, e.g. alignment
sl – Output stream to write to
- Returns:
the output stream given as
sl
-
class SurfaceArrayCreator
It is designed create sub surface arrays to be ordered on Surfaces.
Public Functions
-
inline explicit SurfaceArrayCreator(const Config &cfg, std::unique_ptr<const Logger> logger = getDefaultLogger("SurfaceArrayCreator", Logging::INFO))
Constructor with explicit config.
- Parameters:
cfg – Explicit config struct
logger – logging instance
-
inline explicit SurfaceArrayCreator(std::unique_ptr<const Logger> logger = getDefaultLogger("SurfaceArrayCreator", Logging::INFO))
Constructor with default config.
- Parameters:
logger – logging instance
-
virtual ~SurfaceArrayCreator() = default
Destructor.
-
inline void setLogger(std::unique_ptr<const Logger> logger)
Set logging instance.
- Parameters:
logger – is the logging instance to be set
SurfaceArrayCreator interface method.
create an array in a cylinder, binned in phi, z when extrema and bin numbers are unknown - this method goes through the surfaces and finds out the needed information
Warning
This function requires the cylinder aligned with the z-axis
- Parameters:
surfaces – is the vector of pointers to sensitive surfaces to be ordered on the cylinder
gctx – [in] The geometry context for this building call
protoLayerOpt – The proto layer containing the layer size
bTypePhi – the binning type in phi direction (equidistant/arbitrary)
bTypeZ – the binning type in z direction (equidistant/arbitrary)
transform – is the (optional) additional transform applied
maxNeighborDistance – Maximum next neighbor distance to be included in neighbor lookups
- Pre:
the pointers to the sensitive surfaces in the surfaces vectors all need to be valid, since no check is performed
- Returns:
a unique pointer a new SurfaceArray
SurfaceArrayCreator interface method.
create an array in a cylinder, binned in phi, z when extrema and bin numbers are known
Warning
This function requires the cylinder aligned with the z-axis
- Parameters:
surfaces – is the vector of pointers to sensitive surfaces to be ordered on the cylinder
gctx – [in] The geometry context for this building call
protoLayerOpt – The proto layer containing the layer size
binsPhi – is the number of bins in phi for the surfaces
binsZ – is the number of bin in Z for the surfaces
transform – is the (optional) additional transform applied
maxNeighborDistance – Maximum next neighbor distance to be included in neighbor lookups
- Pre:
the pointers to the sensitive surfaces in the surfaces vectors all need to be valid, since no check is performed
- Returns:
a unique pointer to a new SurfaceArray
SurfaceArrayCreator interface method.
create an array in a cylinder, binned in phi, r when extrema and bin numbers are unknown - this method goes through the surfaces and finds out the needed information
Note
If there is more than on R-Ring, number of phi bins will be set to lowest number of surfaces of any R-ring. This ignores bTypePhi and produces equidistant binning in phi
Warning
This function requires the disc aligned with the z-axis
- Parameters:
surfaces – is the vector of pointers to sensitive surfaces to be ordered on the disc
gctx – [in] The geometry context for this building call
protoLayerOpt – The proto layer containing the layer size
bTypeR – the binning type in r direction (equidistant/arbitrary)
bTypePhi – the binning type in phi direction (equidistant/arbitrary)
transform – is the (optional) additional transform applied
maxNeighborDistance – Maximum next neighbor distance to be included in neighbor lookups
- Pre:
the pointers to the sensitive surfaces in the surfaces vectors all need to be valid, since no check is performed
- Returns:
a unique pointer a new SurfaceArray
SurfaceArrayCreator interface method.
create an array on a disc, binned in r, phi when extrema and bin numbers are known
Warning
This function requires the disc aligned with the z-axis
- Parameters:
surfaces – is the vector of pointers to sensitive surfaces to be ordered on the disc
gctx – [in] The geometry context for this building call
protoLayerOpt – The proto layer containing the layer size
binsPhi – is the number of bins in phi for the surfaces
binsR – is the number of bin in R for the surfaces
transform – is the (optional) additional transform applied
maxNeighborDistance – Maximum next neighbor distance to be included in neighbor lookups
- Pre:
the pointers to the sensitive surfaces in the surfaces vectors all need to be valid, since no check is performed
- Returns:
a unique pointer a new SurfaceArray
SurfaceArrayCreator interface method.
create an array on a plane
Warning
This function requires the plane aligned with either the x-, y- or z-axis
- Parameters:
gctx – [in] The geometry context for this building call
surfaces – [in] is the vector of pointers to sensitive surfaces to be ordered on the plane
bins1 – [in] is the number of bins in the orthogonal direction to
aDirbins2 – [in] is the number of bins in the orthogonal direction to
aDiraDir – [in] Direction of the aligned surfaces
protoLayerOpt – [in] Optional
ProtoLayerinstancetransform – [in] is the (optional) additional transform applied
maxNeighborDistance – Maximum next neighbor distance to be included in neighbor lookups
- Pre:
the pointers to the sensitive surfaces in the surfaces vectors all need to be valid, since no check is performed
- Returns:
a unique pointer a new SurfaceArray
Public Static Functions
-
static inline bool isSurfaceEquivalent(const GeometryContext &gctx, AxisDirection aDir, const Surface *a, const Surface *b)
Static check function for surface equivalent.
- Parameters:
gctx – [in] the geometry context for this check
aDir – the axis direction for the binning
a – first surface for checking
b – second surface for checking
- Returns:
true if surfaces are equivalent for binning purposes
Friends
- friend struct ActsTests::SurfaceArrayCreatorFixture
-
struct Config
Configuration options for the surface array creator.
Public Members
-
bool doPhiBinningOptimization = true
Optimize the binning in phi for disc layers.
Reduces the number of bins to the lowest number of non-equivalent phi surfaces of all r-bins. If false, this step is skipped.
-
SurfaceMatcher surfaceMatcher = SurfaceArrayCreator::isSurfaceEquivalent
Type-erased function which determines whether two surfaces are supposed to be considered equivalent in terms of the binning.
-
bool doPhiBinningOptimization = true
-
inline explicit SurfaceArrayCreator(const Config &cfg, std::unique_ptr<const Logger> logger = getDefaultLogger("SurfaceArrayCreator", Logging::INFO))
-
class SurfaceBounds
Interface for surface bounds.
Surface bounds provide:
inside() checks
distance to boundary calculations
the BoundsType and a set of parameters to simplify persistency
Subclassed by Acts::ConeBounds, Acts::CylinderBounds, Acts::DiscBounds, Acts::InfiniteBounds, Acts::LineBounds, Acts::PlanarBounds
Public Types
-
enum BoundsType
This is nested to the SurfaceBounds, as also VolumeBounds will have Bounds Type.
Values:
-
enumerator eCone
-
enumerator eCylinder
-
enumerator eDiamond
-
enumerator eDisc
-
enumerator eEllipse
-
enumerator eLine
-
enumerator eRectangle
-
enumerator eTrapezoid
-
enumerator eTriangle
-
enumerator eDiscTrapezoid
-
enumerator eConvexPolygon
-
enumerator eAnnulus
-
enumerator eBoundless
-
enumerator eOther
-
enumerator eCone
Public Functions
-
virtual ~SurfaceBounds() = default
-
virtual SquareMatrix2 boundToCartesianJacobian(const Vector2 &lposition) const = 0
Computes the bound to cartesian jacobian at a given local position.
- Parameters:
lposition – is the local position at which the jacobian is computed
- Returns:
the bound to cartesian jacobian
-
virtual SquareMatrix2 boundToCartesianMetric(const Vector2 &lposition) const = 0
Computes the bound to cartesian metric at a given local position.
- Parameters:
lposition – is the local position at which the metric is computed
- Returns:
the bound to cartesian metric
-
virtual Vector2 center() const = 0
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const = 0
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline virtual double distance(const Vector2 &lposition) const
Calculates the distance to the bounds from a given local position.
- Parameters:
lposition – is the local position
- Returns:
the distance to the bounds
-
virtual bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
virtual bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
virtual bool isCartesian() const = 0
Check if the bound coordinates are cartesian.
- Returns:
true if the bound coordinates are cartesian
-
virtual std::ostream &toStream(std::ostream &os) const = 0
Output Method for std::ostream, to be overloaded by child classes.
- Parameters:
os – is the outstream in which the string dump is done
- Returns:
Modified ostream for chaining
-
virtual BoundsType type() const = 0
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const = 0
Access method for bound values, this is a dynamically sized vector containing the parameters needed to describe these bounds.
- Returns:
of the stored values for this SurfaceBounds object
Friends
-
inline friend std::ostream &operator<<(std::ostream &os, const SurfaceBounds &sb)
-
inline friend bool operator==(const SurfaceBounds &lhs, const SurfaceBounds &rhs)
-
class SympyStepper
Stepper implementation using sympy-generated expressions.
Public Types
-
using BoundParameters = BoundTrackParameters
Type alias for bound track parameters.
-
using BoundState = std::tuple<BoundParameters, Jacobian, double>
Bound state tuple containing parameters, Jacobian, and path length.
-
using Covariance = BoundMatrix
Type alias for covariance matrix.
-
using Jacobian = BoundMatrix
Type alias for jacobian matrix.
Public Functions
-
explicit SympyStepper(const Config &config)
Constructor with configuration.
- Parameters:
config – The configuration of the stepper
Constructor requires knowledge of the detector’s magnetic field.
- Parameters:
bField – The magnetic field provider
-
inline double absoluteMomentum(const State &state) const
Absolute momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Absolute momentum
-
Result<BoundState> boundState(State &state, const Surface &surface, bool transportCov = true, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Create and return the bound state at the current position.
This transports (if necessary) the covariance to the surface and creates a bound state. It does not check if the transported state is at the surface, this needs to be guaranteed by the propagator
- Parameters:
state – [in] State that will be presented as
BoundStatesurface – [in] The surface to which we bind the state
transportCov – [in] Flag steering covariance transport
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
- Returns:
A bound state:
the parameters at the surface
the stepwise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline double charge(const State &state) const
Charge access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Particle charge
-
BoundState curvilinearState(State &state, bool transportCov = true) const
Create and return a curvilinear state at the current position.
This transports (if necessary) the covariance to the current position and creates a curvilinear state.
- Parameters:
state – [in] State that will be presented as
CurvilinearStatetransportCov – [in] Flag steering covariance transport
- Returns:
A curvilinear state:
the curvilinear parameters at given position
the stepweise jacobian towards it (from last bound)
and the path length (from start - for ordering)
-
inline Vector3 direction(const State &state) const
Momentum direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Direction vector
-
inline Result<Vector3> getField(State &state, const Vector3 &pos) const
Get the field for the stepping, it checks first if the access is still within the Cell, and updates the cell if necessary.
- Parameters:
state – [inout] is the propagation state associated with the track the magnetic field cell is used (and potentially updated)
pos – [in] is the field position
- Returns:
Magnetic field vector
-
inline double getStepSize(const State &state, ConstrainedStep::Type stype) const
Get the step size.
- Parameters:
state – [in] The stepping state (thread-local cache)
stype – [in] The step size type to be returned
- Returns:
Step size
-
void initialize(State &state, const BoundParameters &par) const
Initialize the state from bound track parameters.
- Parameters:
state – The state to initialize
par – The bound track parameters
-
void initialize(State &state, const BoundVector &boundParams, const std::optional<BoundMatrix> &cov, ParticleHypothesis particleHypothesis, const Surface &surface) const
Initialize the state from bound parameters.
- Parameters:
state – The state to initialize
boundParams – Bound track parameters vector
cov – Covariance matrix
particleHypothesis – Particle hypothesis
surface – Reference surface
-
State makeState(const Options &options) const
Create a state object.
- Parameters:
options – Stepper options
- Returns:
State object
-
inline Vector3 momentum(const State &state) const
Momentum accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Momentum vector
-
inline std::string outputStepSize(const State &state) const
Output the Step Size - single component.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
- Returns:
String representation of step size
-
inline const ParticleHypothesis &particleHypothesis(const State &state) const
Particle hypothesis.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Particle hypothesis
-
inline Vector3 position(const State &state) const
Global particle position accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Position vector
-
bool prepareCurvilinearState(State &state) const
If necessary fill additional members needed for curvilinearState.
Compute path length derivatives in case they have not been computed yet, which is the case if no step has been executed yet.
- Parameters:
state – [inout] State of the stepper
- Returns:
true if nothing is missing after this call, false otherwise.
-
inline double qOverP(const State &state) const
QoP direction accessor.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Charge over momentum
-
inline void releaseStepSize(State &state, ConstrainedStep::Type stype) const
Release the Step size.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stype – [in] The step size type to be released
-
Result<double> step(State &state, Direction propDir, const IVolumeMaterial *material) const
Perform a Runge-Kutta track parameter propagation step.
Note
The state contains the desired step size. It can be negative during backwards track propagation, and since we’re using an adaptive algorithm, it can be modified by the stepper class during propagation.
- Parameters:
state – [inout] State of the stepper
propDir – is the direction of propagation
material – is the optional volume material we are stepping through.
- Returns:
the result of the step
-
inline double time(const State &state) const
Time access.
- Parameters:
state – [in] The stepping state (thread-local cache)
- Returns:
Time
-
void transportCovarianceToBound(State &state, const Surface &surface, const FreeToBoundCorrection &freeToBoundCorrection = FreeToBoundCorrection(false)) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
Note
no check is done if the position is actually on the surface
- Template Parameters:
surface_t – the Surface type
- Parameters:
state – [inout] State of the stepper
surface – [in] is the surface to which the covariance is forwarded to
freeToBoundCorrection – [in] Correction for non-linearity effect during transform from free to bound
-
void transportCovarianceToCurvilinear(State &state) const
Method for on-demand transport of the covariance to a new curvilinear frame at current position, or direction of the state.
- Parameters:
state – [inout] State of the stepper
-
void update(State &state, const FreeVector &freeParams, const BoundVector &boundParams, const Covariance &covariance, const Surface &surface) const
Method to update a stepper state to the some parameters.
- Parameters:
state – [inout] State object that will be updated
freeParams – [in] Free parameters that will be written into
stateboundParams – [in] Corresponding bound parameters used to update jacToGlobal in
statecovariance – [in] The covariance that will be written into
statesurface – [in] The surface used to update the jacToGlobal
-
void update(State &state, const Vector3 &uposition, const Vector3 &udirection, double qOverP, double time) const
Method to update the stepper state.
- Parameters:
state – [inout] State object that will be updated
uposition – [in] the updated position
udirection – [in] the updated direction
qOverP – [in] the updated qOverP value
time – [in] the updated time value
Update step size.
This method intersects the provided surface and update the navigation step estimation accordingly (hence it changes the state). It also returns the status of the intersection to trigger onSurface in case the surface is reached.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
target – [in] The NavigationTarget
direction – [in] The propagation direction
stype – [in] The step size type to be set
-
inline void updateStepSize(State &state, double stepSize, ConstrainedStep::Type stype) const
Update step size - explicitly with a double.
- Parameters:
state – [in,out] The stepping state (thread-local cache)
stepSize – [in] The step size value
stype – [in] The step size type to be set
-
inline IntersectionStatus updateSurfaceStatus(State &state, const Surface &surface, std::uint8_t index, Direction navDir, const BoundaryTolerance &boundaryTolerance, double surfaceTolerance, ConstrainedStep::Type stype, const Logger &logger = getDummyLogger()) const
Update surface status.
It checks the status to the reference surface & updates the step size accordingly
- Parameters:
state – [inout] The stepping state (thread-local cache)
surface – [in] The surface provided
index – [in] The surface intersection index
navDir – [in] The navigation direction
boundaryTolerance – [in] The boundary check for this status update
surfaceTolerance – [in] Surface tolerance used for intersection
stype – [in] The step size type to be set
logger – [in] A
Loggerinstance
- Returns:
Intersection status
-
struct Config
Configuration for the sympy stepper.
Public Members
-
std::shared_ptr<const MagneticFieldProvider> bField
Magnetic field provider.
-
std::shared_ptr<const MagneticFieldProvider> bField
-
struct Options : public Acts::StepperPlainOptions
Runtime options for sympy propagation.
Public Functions
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
Constructor.
- Parameters:
gctx – Geometry context
mctx – Magnetic field context
-
inline void setPlainOptions(const StepperPlainOptions &options)
Set plain stepper options.
- Parameters:
options – Plain stepper options
-
inline Options(const GeometryContext &gctx, const MagneticFieldContext &mctx)
-
struct State
State for track parameter propagation.
It contains the stepping information and is provided thread local by the propagator
Public Functions
-
inline State(const Options &optionsIn, MagneticFieldProvider::Cache fieldCacheIn)
Constructor from the initial bound track parameters.
Note
the covariance matrix is copied when needed
- Parameters:
optionsIn – [in] is the configuration of the stepper
fieldCacheIn – [in] is the cache object for the magnetic field
Public Members
-
Covariance cov = Covariance::Zero()
Covariance matrix for error propagation.
-
bool covTransport = false
Covariance matrix (and indicator) associated with the initial error on track parameters.
-
FreeVector derivative = FreeVector::Zero()
The propagation derivative.
-
MagneticFieldProvider::Cache fieldCache
This caches the current magnetic field cell and stays (and interpolates) within it as long as this is valid.
See step() code for details.
-
BoundToFreeMatrix jacToGlobal = BoundToFreeMatrix::Zero()
Jacobian from local to the global frame.
-
FreeMatrix jacTransport = FreeMatrix::Identity()
Pure transport jacobian part from runge kutta integration.
-
detail::MaterialEffectsAccumulator materialEffectsAccumulator
Accumulator for material effects along the trajectory.
-
std::size_t nSteps = 0
Total number of performed steps.
-
std::size_t nStepTrials = 0
Totoal number of attempted steps.
-
FreeVector pars = FreeVector::Zero()
Internal free vector parameters.
-
ParticleHypothesis particleHypothesis = ParticleHypothesis::pion()
Particle hypothesis.
-
double pathAccumulated = 0.
Accumulated path length state.
-
double previousStepSize = 0.
Last performed step (for overstep limit calculation)
-
StepperStatistics statistics
Statistics of the stepper.
-
ConstrainedStep stepSize
Adaptive step size of the runge-kutta integration.
-
inline State(const Options &optionsIn, MagneticFieldProvider::Cache fieldCacheIn)
-
using BoundParameters = BoundTrackParameters
-
template<TrackContainerBackend track_container_t, CommonMultiTrajectoryBackend traj_t, template<typename> class holder_t = RefHolder>
class TrackContainer Track container interface class.
This type represents a collections of tracks. It uses a backend to store both the actual tracks and the associated track states.
- Template Parameters:
track_container_t – the track container backend
traj_t – the track state container backend
holder_t – ownership management class for the backend
TrackContainer construction
Constructors for the track container by using a set of backends (track + track state). The container can either take ownership of the backends or just hold references to them. This is driven by the
holder_ttemplate parameter, where you can also supply a custom holder type. Template deduction is used to try to guess the correct holder type.-
inline TrackContainer(holder_t<track_container_t> container, holder_t<traj_t> traj)
Constructor from a track container backend and a track state container backend.
- Parameters:
container – the track container backend
traj – the track state container backend
- inline TrackContainer (auto &container, auto &traj) requires(std
Constructor from references to a track container backend and to a track state container backend.
Note
The track container will not assume ownership over the backends in this case. You need to ensure suitable lifetime
- Parameters:
container – the track container backend
traj – the track state container backend
- inline TrackContainer (const auto &container, const auto &traj) requires(std
Constructor from const references to a track container backend and to a track state container backend.
Note
The track container will not assume ownership over the backends in this case. You need to ensure suitable lifetime
- Parameters:
container – the track container backend
traj – the track state container backend
TrackContainer track (proxy) access and manipulation
These methods allow accessing tracks, i.e. adding or retrieving a track proxy that points at a specific track in the container.
-
inline ConstTrackProxy getTrack(IndexType itrack) const
Get a const track proxy for a track index.
- Parameters:
itrack – the track index in the container
- Returns:
A const track proxy for the index
-
inline TrackProxy getTrack(IndexType itrack)
requires (!ReadOnly) Get a mutable track proxy for a track index.
Note
Only available if the track container is not read-only
- Parameters:
itrack – the track index in the container
- Returns:
A mutable track proxy for the index
-
inline ConstTrackProxy at(IndexType itrack) const
Get a const track proxy for a track index.
- Parameters:
itrack – the track index in the container
- Returns:
A const track proxy for the index
-
inline TrackProxy at(IndexType itrack)
requires (!ReadOnly) Get a mutable track proxy for a track index.
Note
Only available if the track container is not read-only
- Parameters:
itrack – the track index in the container
- Returns:
A mutable track proxy for the index
-
inline IndexType addTrack()
requires (!ReadOnly) Add a track to the container.
Note this only creates the logical track and allocates memory. You can combine this with
getTrackto obtain a track proxyNote
Only available if the track container is not read-only
- Returns:
the index to the newly added track
-
inline TrackProxy makeTrack()
requires (!ReadOnly) Add a track to the container and return a track proxy to it This effectively calls
addTrackandgetTrack.Note
Only available if the track container is not read-only
- Returns:
a track proxy to the newly added track
-
inline void removeTrack(IndexType itrack)
requires (!ReadOnly) Remove a track at index
itrackfrom the container.Note
Only available if the track container is not read-only
Note
This invalidates track proxies that point to tracks with larger indices than
itrack!- Parameters:
itrack – The index of the track to remove
-
inline iterator begin()
requires (!ReadOnly) Get a mutable iterator to the first track in the container.
Note
Only available if the track container is not read-only
- Returns:
a mutable iterator to the first track
-
inline iterator end()
requires (!ReadOnly) Get a past-the-end iterator for this container.
Note
Only available if the track container is not read-only
- Returns:
a past-the-end iterator
-
inline const_iterator begin() const
Get an const iterator to the first track in the container.
- Returns:
a const iterator to the first track
-
inline const_iterator end() const
Get a past-the-end iterator for this container.
- Returns:
a past-the-end iterator
TrackContainer column management
TrackContainer can manage a set of common static columns, and dynamic columns that can be added at runtime.
This set of methods allows you to manage the dynamic columns.
-
template<typename T>
inline constexpr void addColumn(std::string_view key)
requires (!ReadOnly) Add a dynamic column to the track container.
Note
Only available if the track container is not read-only
- Parameters:
key – the name of the column to be added
-
inline constexpr bool hasColumn(const std::string &key) const
Check if this track container has a specific dynamic column.
- Parameters:
key – the key to check for
- Returns:
true if the column exists
-
inline constexpr bool hasColumn(HashedString key) const
Check if a this track container has a specific dynamic column.
- Parameters:
key – the key to check for
- Returns:
true if the column exists
-
template<typename other_track_container_t>
inline void ensureDynamicColumns(const other_track_container_t &other)
requires (!ReadOnly) Helper function to make this track container match the dynamic columns of another one.
This will only work if the track container supports this source, and depends on the implementation details of the dynamic columns of the container
Note
Only available if the track container is not read-only
- Template Parameters:
other_track_container_t – Type of the other track container
- Parameters:
other – The other track container
TrackContainer backend access
These methods allow accessing the backend of the track container.
In most cases, this is not necessary for interacting with the container.
-
inline auto &container()
requires (!ReadOnly) Get a mutable reference to the track container backend.
Note
Only available if the track container is not read-only
- Returns:
a mutable reference to the backend
-
inline const auto &container() const
Get a const reference to the track container backend.
- Returns:
a const reference to the backend
-
inline auto &trackStateContainer()
requires (!ReadOnly) Get a mutable reference to the track state container backend.
Note
Only available if the track container is not read-only
- Returns:
a mutable reference to the backend
-
inline auto &trackStateContainerHolder()
requires (!ReadOnly) Retrieve the holder of the track state container.
Note
Only available if the track container is not read-only
- Returns:
The track state container including it’s holder
-
inline const auto &trackStateContainer() const
Get a const reference to the track state container backend.
- Returns:
a const reference to the backend
-
inline const auto &trackStateContainerHolder() const
Retrieve the holder of the track state container.
- Returns:
The track state container including it’s holder
Public Types
-
using const_iterator = detail::ContainerIterator<TrackContainer, ConstTrackProxy, IndexType, true>
Type alias for const iterator over tracks in container.
-
using ConstTrackProxy = Acts::TrackProxy<track_container_t, traj_t, holder_t, true>
Alias for the const version of a track proxy, with the same backends as this container.
-
using ConstTrackStateProxy = typename MultiTrajectory<traj_t>::ConstTrackStateProxy
Type alias for const track state proxy from multi-trajectory.
-
using IndexType = TrackIndexType
The index type of the track container, taken from the container backend.
-
using iterator = detail::ContainerIterator<TrackContainer, TrackProxy, IndexType, false>
Type alias for mutable iterator over tracks in container.
-
using TrackContainerBackend = track_container_t
Type alias for track container backend type.
-
using TrackProxy = Acts::TrackProxy<track_container_t, traj_t, holder_t, false>
Alias for the mutable version of a track proxy, with the same backends as this container.
-
using TrackStateProxy = typename MultiTrajectory<traj_t>::TrackStateProxy
Type alias for mutable track state proxy from multi-trajectory.
Public Functions
Public Static Attributes
-
static constexpr IndexType kInvalid = kTrackIndexInvalid
Sentinel value that indicates an invalid index.
-
static constexpr bool ReadOnly = IsReadOnlyTrackContainer<track_container_t>::value
Indicates if this track container is read-only, or if it can be modified.
-
template<typename track_container_t, typename trajectory_t, template<typename> class holder_t, bool read_only = true>
class TrackProxy : public Acts::TrackProxyCommon<TrackProxy<track_container_t, trajectory_t, holder_t, true>, track_container_t::IndexType, true> Proxy class representing a single track.
This class provides a view into an associated TrackContainer, and has reference semantics. You can think of it as a pointer to a vector of tracks, which exposes an object-oriented interface for accessing the track properties.
- Template Parameters:
track_container_t – the container backend
trajectory_t – the track state container backend
holder_t – ownership management class for the backend
read_only – true if this track container is not mutable
Constructors and assignment operator
Public constructors and assignment operators for
TrackProxyonly allow construction from anotherTrackProxy. You should generally not have to constructTrackProxymanually.-
TrackProxy(const TrackProxy &other) = default
Copy constructor: const to const or mutable to mutable.
- Parameters:
other – the other track proxy
-
TrackProxy &operator=(const TrackProxy &other) = default
Copy assignment operator: const to const or mutable to mutable.
- Parameters:
other – the other track proxy
- Returns:
reference to this track proxy
-
inline explicit TrackProxy(const MutableTrackProxy &other)
requires ReadOnly Constructor from mutable track proxy.
Note
Only available if the track proxy is read-only
- Parameters:
other – the other track proxy
-
inline TrackProxy &operator=(const MutableTrackProxy &other)
requires ReadOnly Copy assignment operator from mutable track proxy.
Note
Only available if the track proxy is read-only
- Parameters:
other – the other track proxy
- Returns:
reference to this track proxy
TrackProxy properties
Methods that give access to the properties of a track represented by
TrackProxy.Many of these methods come in a
constand a non-constversion. The non-constversion is only available if you have an instance ofTrackProxythat does not have theread_onlytemplate parameter set totrue, even if you hold it as an lvalue.-
inline const Surface &referenceSurface() const
Get the reference surface of the track (e.g.
the perigee)
- Returns:
the reference surface
Set a new reference surface for this track.
- Parameters:
srf – The surface to set
-
inline bool hasReferenceSurface() const
Returns whether the track has a reference surface or not.
- Returns:
whether a surface exists or not
-
inline ConstParameters parameters() const
Get the parameters of the track at the reference surface (e.g.
perigee). Const version
- Returns:
Proxy vector for the parameters
-
inline ConstCovariance covariance() const
Get the covariance of the track at the reference surface (e.g.
perigee). Const version
- Returns:
Proxy matrix for the covariance
-
inline Parameters parameters()
requires (!ReadOnly) Get the parameters of the track at the reference surface (e.g.
perigee). Mutable version
Note
Only available if the track proxy is not read-only
- Returns:
Proxy vector for the parameters
-
inline Covariance covariance()
requires (!ReadOnly) Get the covariance of the track at the reference surface (e.g.
perigee). Mutable version
Note
Only available if the track proxy is not read-only
- Returns:
Proxy matrix for the covariance
-
inline ParticleHypothesis particleHypothesis() const
Get the particle hypothesis.
- Returns:
the particle hypothesis
-
inline void setParticleHypothesis(const ParticleHypothesis &particleHypothesis)
requires (!ReadOnly) Set a new particle hypothesis for this track.
Note
Only available if the track proxy is not read-only
- Parameters:
particleHypothesis – The particle hypothesis to set
-
inline unsigned int nTrackStates() const
Return the number of track states associated to this track.
Note
This is calculated by iterating over the track states which is somewhat expensive. Consider caching this value if you need It more than once.
- Returns:
The number of track states
-
inline IndexType index() const
Return the index of this track in the track container.
Note
This is separate from the tip index
- Returns:
the track index
-
inline double absoluteMomentum() const
Get the absolute momentum.
- Returns:
The absolute momentum value
-
inline double charge() const
Get the charge.
- Returns:
The charge value
-
inline float chi2() const
Return the local chi-squared contribution.
- Returns:
The chi-squared value
-
inline float &chi2()
requires (!read_only) Return a mutable reference to the local chi-squared contribution.
- Returns:
Mutable reference to the chi-squared value
-
inline Vector3 direction() const
Get a unit vector along the track direction at the reference surface.
- Returns:
The direction unit vector
-
inline Vector4 fourMomentum() const
Get the four-momentum vector: (px, py, pz, e)
- Returns:
the four-momentum vector
-
inline bool isForwardLinked() const
Return whether the track is forward-linked, i.e.
whether each track state has a valid next-state index. Forward-linking is required to use the inside-out
trackStates()range.- Returns:
True if the track is forward-linked
-
inline double loc0() const
Access the loc0 parameter of the track at the reference surface.
- Returns:
The loc0 parameter
-
inline double loc1() const
Access the loc1 parameter of the track at the reference surface.
- Returns:
The loc1 parameter
-
inline Vector3 momentum() const
Get the global momentum vector.
- Returns:
the global momentum vector
-
inline unsigned int nDoF() const
Return the number of degrees of freedom.
- Returns:
The number of degrees of freedom
-
inline unsigned int &nDoF()
requires (!read_only) Return a mutable reference to the number of degrees of freedom.
- Returns:
Mutable reference to the number of degrees of freedom
-
inline unsigned int nHoles() const
Return the number of holes on this track.
- Returns:
The number of holes
-
inline unsigned int &nHoles()
requires (!read_only) Return a mutable reference to the number of holes.
- Returns:
Mutable reference to the number of holes
-
inline unsigned int nMeasurements() const
Return the number of measurements assigned to this track.
- Returns:
The number of measurements
-
inline unsigned int &nMeasurements()
requires (!read_only) Return a mutable reference to the number of measurements.
- Returns:
Mutable reference to the number of measurements
-
inline unsigned int nOutliers() const
Return the number of outliers for this track.
- Returns:
The number of outliers
-
inline unsigned int &nOutliers()
requires (!read_only) Return a mutable reference to the number of outliers.
- Returns:
Mutable reference to the number of outliers
Return the number of shared hits for this track.
- Returns:
The number of shared hits
Return a mutable reference to the number of shared hits.
- Returns:
Mutable reference to the number of shared hits
-
inline double phi() const
Access the phi parameter of the track at the reference surface.
- Returns:
The phi parameter
-
inline double qOverP() const
Access the q/p (curvature) parameter of the track at the reference surface.
- Returns:
The q/p parameter
-
inline IndexType stemIndex() const
Get the stem index, i.e.
the innermost track state in the track.
- Returns:
The stem index
-
inline IndexType &stemIndex()
requires (!read_only) Get a mutable reference to the stem index.
- Returns:
Mutable reference to the stem index
-
inline double theta() const
Access the theta parameter of the track at the reference surface.
- Returns:
The theta parameter
-
inline double time() const
Access the time parameter of the track at the reference surface.
- Returns:
The time parameter
-
inline IndexType tipIndex() const
Get the tip index, i.e.
the entry point into the track state container.
- Returns:
The tip index
-
inline IndexType &tipIndex()
requires (!read_only) Get a mutable reference to the tip index.
- Returns:
Mutable reference to the tip index
-
inline double transverseMomentum() const
Get the transverse momentum.
- Returns:
The transverse momentum value
TrackProxy track state access
Methods that give access to the track states of a track represented by
TrackProxy.-
inline ConstTrackStateProxy outermostTrackState() const
Return a const track state proxy to the outermost track state.
- Returns:
The outermost track state proxy
-
inline TrackStateProxy outermostTrackState()
requires (!ReadOnly) Return a mutable track state proxy to the outermost track state.
- Returns:
The outermost track state proxy
-
inline auto innermostTrackState() const
Return a const track state proxy to the innermost track state.
Note
This is only available, if the track is forward linked
- Returns:
The innermost track state proxy
-
inline auto innermostTrackState()
requires (!ReadOnly) Return a mutable track state proxy to the innermost track state.
Note
This is only available, if the track is forward linked
Note
Only available if the track proxy is not read-only
- Returns:
The innermost track state proxy
-
inline auto trackStatesReversed() const
Get a range over the track states of this track.
Return value is compatible with range based for loop. Const version
Note
This range is from the outside inwards!
- Returns:
Track state range to iterate over
-
inline auto trackStatesReversed()
requires (!ReadOnly) Get a range over the track states of this track.
Return value is compatible with range based for loop. Mutable version
Note
Only available if the track proxy is not read-only
Note
This range is from the outside inwards!
- Returns:
Track state range to iterate over
-
inline auto trackStates() const
Get a range over the track states of this track.
Return value is compatible with range based for loop. This overload returns a const-only track state range, which means you cannot modify the track states obtained in the iteration.
Note
This range is from the inside out!
Warning
This access direction is only possible if the track states are forward-linked.
- Returns:
Track state range to iterate over
-
inline auto trackStates()
requires (!ReadOnly) Get a range over the track states of this track.
Return value is compatible with range based for loop. This overload returns a mutable track state range, which means you can modify the track states obtained in the iteration.
Note
Only available if the track proxy is not read-only
Note
This range is from the inside out!
Warning
This access direction is only possible if the track states are forward-linked.
- Returns:
Track state range to iterate over
TrackProxy track state manipulation
Methods that manipulate the track states of a track represented by
TrackProxy.Copy Methods Overview:
Three main copy methods are available with different behaviors:
copyFrom(): Deep copy including all track states (creates new track states)copyFromWithoutStates(): Copy only track properties, invalidate track state indicescopyFromShallow(): Shallow copy sharing the same track states (copy indices only)
Choose based on your needs:
Use
copyFrom()for independent track copies with separate track statesUse
copyFromWithoutStates()to update track metadata without affecting trajectoriesUse
copyFromShallow()for lightweight copies when track states can be shared
-
inline void linkForward()
requires (!ReadOnly) Forward connect a track.
This means setting indices from the inside out on all track states.
Note
Only available if the track proxy is not read-only
-
inline auto appendTrackState(TrackStatePropMask mask = TrackStatePropMask::All)
requires (!ReadOnly) Append a track state to this track.
This will modify the tip index to point at the newly created track state, which will be directly after the previous track state at tip index.
Note
Only available if the track proxy is not read-only
- Parameters:
mask – The allocation prop mask for the new track state
- Returns:
The newly added track state
-
template<TrackProxyConcept track_proxy_t>
inline void copyFrom(const track_proxy_t &other)
requires (!ReadOnly) Create a complete deep copy of another track, including all track states.
This creates new track states in the destination trajectory and copies all data from the source track states. The track state sequence order is preserved.
Implementation details:
Track states are initially copied in reversed order for efficiency
The track state links are then updated using reverseTrackStates()
As a consequence, the resulting track is forward-linked
What gets copied:
All track-level properties (parameters, covariance, particle hypothesis, etc.)
Reference surface (shared pointer is copied)
Track summary data (nMeasurements, nHoles, chi2, etc.)
All dynamic track columns
Complete sequence of track states with all their data
All dynamic track state columns
Result:
The destination track will have newly created track states
tipIndex() and stemIndex() will point to the new track states
Track state indices will be different from the source
All track state data will be identical to the source
The track will be forward-linked (stemIndex() will be valid)
Note
Only available if the track proxy is not read-only
Note
Both track containers must have compatible dynamic columns
- Template Parameters:
track_proxy_t – the other track proxy’s type
- Parameters:
other – The source track proxy to copy from
-
template<TrackProxyConcept track_proxy_t>
inline void copyFromWithoutStates(const track_proxy_t &other)
requires (!ReadOnly) Copy track-level properties from another track, but not the track states.
This copies all track metadata and properties but leaves the track state sequence unchanged. Useful when you want to copy track properties to an existing track that may already have track states.
What gets copied:
Track parameters at reference surface
Covariance matrix at reference surface
Particle hypothesis
Reference surface (shared pointer is copied)
Track summary data (nMeasurements, nHoles, nOutliers, nSharedHits, chi2, nDoF)
All dynamic track columns
What does NOT get copied:
Track states (existing track states remain unchanged in the container)
Result:
All track-level properties are updated to match the source
tipIndex() and stemIndex() are set to kInvalid (track states become inaccessible)
Existing track states remain in the container but are no longer linked to this track
nTrackStates() will return 0 due to invalid indices
Note
Only available if the track proxy is not read-only
Note
Both track containers must have compatible dynamic columns
- Template Parameters:
track_proxy_t – the other track proxy’s type
- Parameters:
other – The source track proxy to copy properties from
-
template<TrackProxyConcept track_proxy_t>
inline void copyFromShallow(const track_proxy_t &other)
requires (!ReadOnly) Create a shallow copy from another track, sharing the same track states.
This copies all track-level properties and makes the destination track point to the same track state sequence as the source. The track states themselves are not duplicated - both tracks will reference the same track state objects in memory.
What gets copied:
All track-level properties (parameters, covariance, particle hypothesis, etc.)
Reference surface (shared pointer is copied)
Track summary data (nMeasurements, nHoles, chi2, etc.)
All dynamic track columns
tipIndex() and stemIndex() (track state linking information)
What gets shared (not duplicated):
Track states (both tracks reference the same track state objects)
Result:
The destination track will have the same nTrackStates() as the source
Both tracks will iterate over the same track state sequence
Modifications to track states will be visible in both tracks
Track state indices will be identical between tracks
The destination track will have a different track index than the source
Note
Only available if the track proxy is not read-only
Note
Both track containers must have compatible dynamic columns
Warning
Modifying track states through either track will affect both tracks since they share the same track state objects
Warning
It is the user’s responsibility to ensure that the tip and stem indices from the source track are valid in the destination track’s track state container. No validation is performed - invalid indices will lead to undefined behavior when accessing track states
- Template Parameters:
track_proxy_t – the other track proxy’s type
- Parameters:
other – The source track proxy to create a shallow copy from
-
inline void reverseTrackStates(bool invertJacobians = false)
requires (!ReadOnly) Reverse the ordering of track states for this track Afterwards, the previous endpoint of the track state sequence will be the “innermost” track state.
Note
Only available if the track proxy is not read-only
Note
This is dangerous with branching track state sequences, as it will break them
Note
This also automatically forward-links the track!
- Parameters:
invertJacobians – Whether to invert the Jacobians of the track states
TrackProxy generic component access
Methods that give access to generic components of a track represented by
TrackProxy.Internally, a compile-time hash of the component name is used to identify which component is being requested. Most of the named methods in TrackProxy properties use these methods to retrieve the actual data.
A number of overloads exist, where you can either supply the HashedString
keyas a template parameter or a runtime argument. The former has the advantage of being guaranteed to be evaluated at compile-time.-
template<typename T, HashedString key>
inline constexpr T &component()
requires (!ReadOnly) Retrieve a mutable reference to a component.
- Template Parameters:
T – The type of the component to access
key – String key for the component to access
- Returns:
Mutable reference to the component given by
key
-
template<typename T>
inline constexpr T &component(HashedString key)
requires (!ReadOnly) Retrieve a mutable reference to a component.
- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Mutable reference to the component given by
key
-
template<typename T>
inline constexpr T &component(std::string_view key)
requires (!ReadOnly) Retrieve a mutable reference to a component.
Note
This might hash the
keyat runtime instead of compile-time- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Mutable reference to the component given by
key
-
template<typename T, HashedString key>
inline constexpr const T &component() const Retrieve a const reference to a component.
- Template Parameters:
T – The type of the component to access
key – String key for the component to access
- Returns:
Const reference to the component given by
key
-
inline bool hasColumn(HashedString key) const
Check whether a dynamic column exists.
- Parameters:
key – String key for the component to check
- Returns:
whether the column exists
-
template<typename T>
inline constexpr const T &component(HashedString key) const Retrieve a const reference to a component.
- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Const reference to the component given by
key
-
template<typename T>
inline constexpr const T &component(std::string_view key) const Retrieve a const reference to a component.
Note
This might hash the
keyat runtime instead of compile-time- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Const reference to the component given by
key
Public Types
-
using ConstCovariance = typename detail_tsp::FixedSizeTypes<eBoundSize, true>::CovarianceMap
Same as Covariance, but with const semantics.
-
using ConstParameters = typename detail_tsp::FixedSizeTypes<eBoundSize, true>::CoefficientsMap
Same as Parameters, but with const semantics.
-
using ConstProxyType = ConstTrackProxy
Alias for an associated const track proxy, with the same backends.
-
using ConstTrackProxy = TrackProxy<track_container_t, trajectory_t, holder_t, true>
Alias for the const version of this track proxy, with the same backends.
-
using ConstTrackStateProxy = typename Trajectory::ConstTrackStateProxy
Alias for an associated const track state proxy, with the same backends.
-
using Container = track_container_t
The track container backend given as a template parameter.
-
using Covariance = typename detail_tsp::FixedSizeTypes<eBoundSize, false>::CovarianceMap
Map-type for a bound covariance.
This has reference semantics, i.e. points at a matrix by an internal pointer.
-
using IndexType = TrackIndexType
The index type of the track container.
-
using MutableTrackProxy = TrackProxy<track_container_t, trajectory_t, holder_t, false>
Alias for the mutable version of this track proxy, with the same backends.
-
using Parameters = typename detail_tsp::FixedSizeTypes<eBoundSize, false>::CoefficientsMap
Map-type for a bound parameter vector.
This has reference semantics, i.e. points at a matrix by an internal pointer.
-
using TrackStateProxy = typename Trajectory::TrackStateProxy
Alias for an associated mutable track state proxy, with the same backends.
-
using Trajectory = trajectory_t
The track state container backend given as a template parameter.
Public Functions
-
inline const auto &container() const
Return a reference to the track container backend, const version.
- Returns:
reference to the track container backend
-
inline auto &container()
requires (!ReadOnly) Return a reference to the track container backend, mutable version.
Note
Only available if the track proxy is not read-only
- Returns:
reference to the track container backend
-
inline BoundTrackParameters createParametersAtReference() const
Return the track parameters at the reference surface.
Note
The parameters are created on the fly
- Returns:
the track parameters
-
inline BoundTrackParameters createParametersFromState(const ConstTrackStateProxy &trackState) const
Convert a track state into track parameters.
Note
The parameters are created on the fly
- Parameters:
trackState – Track state to convert to parameters
- Returns:
the track parameters
-
inline bool operator==(const TrackProxy &other) const
Equality operator with another track proxy Checks the container identity and the track index.
- Parameters:
other – Other track proxy to compare with
- Returns:
True if the track proxies refer to the same track
-
template<typename trajectory_t, std::size_t M, bool read_only = true>
class TrackStateProxy : public Acts::TrackStateProxyCommon<TrackStateProxy<trajectory_t, M, true>, true> Proxy object to access a single point on the trajectory.
- Template Parameters:
SourceLink – Type to link back to an original measurement
M – Maximum number of measurement dimensions
read_only – true for read-only access to underlying storage
Constructors and assignment operator
Public constructors and assignment operators for
TrackStateProxyonly allow construction from anotherTrackStateProxy. You should generally not have to constructTrackStateProxymanually.-
TrackStateProxy(const TrackStateProxy &other) = default
Copy constructor: const to const or mutable to mutable.
- Parameters:
other – The other TrackStateProxy to construct from
-
TrackStateProxy &operator=(const TrackStateProxy &other) = default
Copy assignment operator: const to const or mutable to mutable.
- Parameters:
other – The other TrackStateProxy to assign from
- Returns:
Reference to this TrackStateProxy
-
inline explicit TrackStateProxy(const TrackStateProxy<Trajectory, M, false> &other)
requires ReadOnly Constructor from mutable TrackStateProxy.
Note
Only available if the track state proxy is read-only
- Parameters:
other – The other TrackStateProxy to construct from
-
inline TrackStateProxy &operator=(const TrackStateProxy<Trajectory, M, false> &other)
requires ReadOnly Assignment operator to from mutable
TrackStateProxy.Note
Only available if the track state proxy is read-only
- Parameters:
other – The other TrackStateProxy to assign from
- Returns:
Reference to this TrackStateProxy
Track state properties
Properties of the track state represented by
TrackStateProxy.Many of these methods come in a
constand a non-constversion. The non-constversion is only available if you have an instance ofTrackStateProxythat does not have theread_onlytemplate parameter set totrue, even if you hold it as an lvalue.The track states each have an index in the track state container. The sequence of track states is implemented as a one or two-way linked list, which uses indices into the same container.
Each track state has a
previousindex, which points at the track state immediately preceding. A track state with apreviousindex ofkInvalidis the first (innermost) track state in a track or track candidate. This is also referred to as a stem at the track level.During track finding and fitting, track states are usually appended to the sequence, populating the
previousindex of the new track state. Combinatorial track finding can produce track states which fork in this way, by having more than one track state with the samepreviousindex.The track states have static, optional and dynamic properties. Static properties are always present, and can always be retrieved. Optional components use an extra indirection mechanism that coordinates with the backend to allow both not having the component set, or sharing it with other track states. An example is a branching trajectory from track finding which shares the same predicted parameter vector and associated covariance.
Optional components are
predicted parameters and covariance
filtered parameters and covariance
smoothed parameters and covariance
jacobian
calibrated measurement info including projector
They can be unset via unset, getMask can be used to check which components are present. The first four are shareable between track states via shareFrom.
-
inline void unset(TrackStatePropMask target)
requires (!ReadOnly) Unset an optional track state component.
Note
Only available if the track state proxy is not read-only
- Parameters:
target – The component to unset
-
inline void addComponents(TrackStatePropMask mask)
requires (!ReadOnly) Add additional components to the track state.
Note
Only available if the track state proxy is not read-only
- Parameters:
mask – The bitmask that instructs which components to allocate
-
inline bool hasReferenceSurface() const
Returns if the track state has a non nullptr surface associated.
- Returns:
whether a surface exists or not
Set the reference surface to a given value.
Note
This overload is only present in case
ReadOnlyis false.- Parameters:
srf – Shared pointer to the surface to set
Track state measurement properties
Properties of the measurement associated with the track state represented. This consists of a vector and an associated square matrix of a measurement dimension which is between one and the size of the track parametrization. The measurement coordinate frame is required to be a strict subset of the bound track parametrization on the local geometry coordinate frame, i.e. using a pure projector matrix to convert from the bound parametrization to the measurement frame is possible.
The track state stores the parameter vector and covariance, and the backend is given the possibility to do so in a jagged way, i.e. only storing the number of values needed. This requires calling allocateCalibrated before storing the measurements (even if it might be a no-op).
The projector matrix is packed as a bitset, which is converted to a matrix on-demand (and therefore returned by value).
The track state also includes a SourceLink which acts as a proxy to the original uncalibrated measurement that the calibrated measurement was derived from. It is set and returned by value, to allow unpacking / repacking by the backend, if needed.
-
SourceLink getUncalibratedSourceLink() const
Uncalibrated measurement in the form of a source link.
Const version
- Returns:
The uncalibrated measurement source link
-
inline void setUncalibratedSourceLink(SourceLink &&sourceLink)
requires (!ReadOnly) Set an uncalibrated source link.
- Parameters:
sourceLink – The uncalibrated source link to set
-
inline IndexType calibratedSize() const
Return the (dynamic) number of dimensions stored for this measurement.
Note
Depending on the backend, this size is used to determine the memory range of the measurement vector and covariance.
- Returns:
The number of dimensions
-
inline void allocateCalibrated(std::size_t measdim)
requires (!ReadOnly) Allocate storage to be able to store a measurement of size
measdim.This must be called before setting the measurement content.
Note
This does not allocate if an allocation of the same size already exists
Note
This will zero-initialize the allocated storage
Note
This is an error if an existing allocation has different size
- Parameters:
measdim – Number of measurement dimensions to allocate
Sharing and copying
Methods to share and copy track state components. Sharing means setting up more than one track state to point to the same component.
Shareable components are
predicted parameters and covariance
filtered parameters and covariance
smoothed parameters and covariance
jacobian
See TrackStatePropMask.
Share a shareable component within this track state.
- Parameters:
shareSource – Which component to share from
shareTarget – Which component to share as. This should be different from as
shareSource, e.g. predicted can be shared as filtered.
Share a shareable component from another track state.
Note
The track states both need to be stored in the same
MultiTrajectoryinstance- Parameters:
other – Track state proxy to share component from
component – Which component to share.
Share a shareable component from another track state.
Note
Shareable components are predicted, filtered, smoothed, calibrated, jacobian, or projector. See
TrackStatePropMask.- Parameters:
other – Track state proxy to share component(s) from
shareSource – Which component to share from
shareTarget – Which component to share as. This can be be different from as
shareSource, e.g. predicted can be shared as filtered.
-
template<TrackStateProxyConcept track_state_proxy_t>
inline void copyFrom(const track_state_proxy_t &other, TrackStatePropMask mask = TrackStatePropMask::All, bool onlyAllocated = true)
requires (!ReadOnly) Copy the contents of another track state proxy into this one.
Note
If the this track state proxy does not have compatible allocations with the source track state proxy, and
onlyAllocatedis false, an exception is thrown.Note
The mask parameter will not cause a copy of components that are not allocated in the source track state proxy.
- Parameters:
other – The other track state to copy from
mask – An optional mask to determine what to copy from
onlyAllocated – Whether to only copy allocated components
Track state proxy Generic component access
-
template<HashedString key>
inline constexpr bool has() const Check if a component is set.
- Template Parameters:
key – Hashed string key to check for
- Returns:
true if the component exists, false if not
-
inline constexpr bool has(HashedString key) const
Check if a component is set.
- Parameters:
key – Hashed string key to check for
- Returns:
true if the component exists, false if not
-
inline constexpr bool has(std::string_view key) const
Check if a component is set.
Note
This might hash the
keyat runtime instead of compile-time- Parameters:
key – String key to check for
- Returns:
true if the component exists, false if not
-
template<typename T, HashedString key>
inline constexpr T &component()
requires (!ReadOnly) Retrieve a mutable reference to a component.
- Template Parameters:
T – The type of the component to access
key – String key for the component to access
- Returns:
Mutable reference to the component given by
key
-
template<typename T>
inline constexpr T &component(HashedString key)
requires (!ReadOnly) Retrieve a mutable reference to a component.
- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Mutable reference to the component given by
key
-
template<typename T>
inline constexpr T &component(std::string_view key)
requires (!ReadOnly) Retrieve a mutable reference to a component.
Note
This might hash the
keyat runtime instead of compile-time- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Mutable reference to the component given by
key
-
template<typename T, HashedString key>
inline constexpr const T &component() const Retrieve a const reference to a component.
- Template Parameters:
T – The type of the component to access
key – String key for the component to access
- Returns:
Const reference to the component given by
key
-
template<typename T>
inline constexpr const T &component(HashedString key) const Retrieve a const reference to a component.
- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Const reference to the component given by
key
-
template<typename T>
inline constexpr const T &component(std::string_view key) const Retrieve a const reference to a component.
Note
This might hash the
keyat runtime instead of compile-time- Template Parameters:
T – The type of the component to access
- Parameters:
key – String key for the component to access
- Returns:
Const reference to the component given by
key
Public Types
-
template<std::size_t N>
using Calibrated = typename TrackStateTraits<N, false>::Calibrated Map-type for a calibrated measurement vector, where the local measurement dimension is variable.
-
template<std::size_t N>
using CalibratedCovariance = typename TrackStateTraits<N, false>::CalibratedCovariance Map-type for a calibrated measurement covariance matrix, where the local measurement dimension is variable.
-
template<std::size_t N>
using ConstCalibrated = typename TrackStateTraits<N, true>::Calibrated Same as
Calibrated, but with const semantics.
-
template<std::size_t N>
using ConstCalibratedCovariance = typename TrackStateTraits<N, true>::CalibratedCovariance Same as CalibratedCovariance, but with const semantics.
-
using ConstCovariance = typename TrackStateTraits<M, true>::Covariance
Same as Covariance, but with const semantics.
-
using ConstEffectiveCalibrated = typename TrackStateTraits<M, true>::EffectiveCalibrated
Same as
EffectiveCalibrated, but with const semantics.
-
using ConstEffectiveCalibratedCovariance = typename TrackStateTraits<M, true>::EffectiveCalibratedCovariance
Same as EffectiveCalibratedCovariance, but with const semantics.
-
using ConstJacobian = typename TrackStateTraits<M, true>::Covariance
Jacobian shape is identical to Covariance.
-
using ConstParameters = typename TrackStateTraits<M, true>::Parameters
Same as Parameters, but with const semantics.
-
using ConstProxyType = TrackStateProxy<trajectory_t, M, true>
Alias for an associated const track state proxy, with the same backends.
-
using Covariance = typename TrackStateTraits<M, false>::Covariance
Map-type for a bound covariance.
This has reference semantics, i.e. points at a matrix by an internal pointer.
-
using EffectiveCalibrated = typename TrackStateTraits<M, false>::EffectiveCalibrated
Map-type for a measurement vector, where the local measurement dimension is variable.
-
using EffectiveCalibratedCovariance = typename TrackStateTraits<M, false>::EffectiveCalibratedCovariance
Map-type for a measurement covariance matrix, where the local measurement dimension is variable.
-
using IndexType = TrackIndexType
The index type of the track state container.
-
using Jacobian = typename TrackStateTraits<M, false>::Covariance
Jacobian shape is identical to Covariance.
-
using Parameters = typename TrackStateTraits<M, false>::Parameters
Map-type for a bound parameter vector.
This has reference semantics, i.e. points at a matrix by an internal pointer.
-
using Trajectory = trajectory_t
The track state container backend given as a template parameter.
Public Functions
- template<typename val_t, typename cov_t> inline void allocateCalibrated (const Eigen::DenseBase< val_t > &val, const Eigen::DenseBase< cov_t > &cov) requires(!read_only &&Concepts
Allocate and initialize calibrated data from static-size Eigen objects.
- Template Parameters:
val_t – Eigen vector type holding calibrated values.
cov_t – Eigen matrix type holding the covariance.
- Parameters:
val – Vector to copy into the calibrated storage.
cov – Covariance matrix to copy into the calibrated storage.
-
template<std::size_t measdim>
inline TrackStateTraits<measdim, true>::Calibrated calibrated() const Access calibrated measurement data with compile-time dimension.
- Template Parameters:
measdim – Measurement dimension.
- Returns:
Eigen map referencing the calibrated measurement vector.
-
template<std::size_t measdim>
inline TrackStateTraits<measdim, false>::Calibrated calibrated()
requires (!read_only) Access calibrated measurement data with compile-time dimension.
- Template Parameters:
measdim – Measurement dimension.
- Returns:
Mutable Eigen map referencing the calibrated measurement vector.
-
template<std::size_t measdim>
inline TrackStateTraits<measdim, true>::CalibratedCovariance calibratedCovariance() const Access calibrated covariance data with compile-time dimension.
- Template Parameters:
measdim – Measurement dimension.
- Returns:
Eigen map referencing the covariance matrix.
-
template<std::size_t measdim>
inline TrackStateTraits<measdim, false>::CalibratedCovariance calibratedCovariance()
requires (!read_only) Access calibrated covariance data with compile-time dimension.
- Template Parameters:
measdim – Measurement dimension.
- Returns:
Mutable Eigen map referencing the covariance matrix.
-
inline float chi2() const
Retrieve the local chi2 contribution.
- Returns:
Chi2 value associated with this state.
-
inline float &chi2()
requires (!read_only) Retrieve a mutable reference to the local chi2 contribution.
- Returns:
Mutable chi2 value.
-
inline const auto &container() const
Get a const reference to the track state container backend.
- Returns:
a const reference to the backend
-
inline auto &container()
requires (!ReadOnly) Get a mutable reference to the track state container backend.
- Returns:
a mutable reference to the backend
-
inline ConstCovarianceMap covariance() const
Access the best available covariance (smoothed, filtered, or predicted).
- Returns:
Bound covariance map for the state.
-
inline ConstEffectiveCalibratedMap effectiveCalibrated() const
Access the calibrated measurement values with runtime dimension.
- Returns:
Eigen map referencing the calibrated measurement vector.
-
inline EffectiveCalibratedMap effectiveCalibrated()
requires (!read_only) Access mutable calibrated measurement values with runtime dimension.
- Returns:
Eigen map referencing the calibrated measurement vector.
-
inline ConstEffectiveCalibratedCovarianceMap effectiveCalibratedCovariance() const
Access the calibrated covariance with runtime dimension.
- Returns:
Eigen map referencing the measurement covariance matrix.
-
inline EffectiveCalibratedCovarianceMap effectiveCalibratedCovariance()
requires (!read_only) Access mutable calibrated covariance with runtime dimension.
- Returns:
Eigen map referencing the measurement covariance matrix.
-
inline ConstParametersMap filtered() const
Access the filtered parameter vector.
- Returns:
Bound parameter map for the filtered state.
-
inline ParametersMap filtered()
requires (!read_only) Access the filtered parameter vector.
- Returns:
Mutable bound parameter map for the filtered state.
-
inline ConstCovarianceMap filteredCovariance() const
Access the filtered covariance matrix.
- Returns:
Bound covariance map for the filtered state.
-
inline CovarianceMap filteredCovariance()
requires (!read_only) Access the filtered covariance matrix.
- Returns:
Mutable bound covariance map for the filtered state.
-
inline TrackStatePropMask getMask() const
Compute the property mask describing which components are present.
- Returns:
Bit mask of available properties.
-
inline bool hasCalibrated() const
Check for presence of calibrated measurement data.
- Returns:
True if calibrated measurements exist.
-
inline bool hasColumn(HashedString key) const
Check if the track state has a specific dynamic column.
- Parameters:
key – The hashed column key
- Returns:
true if the column exists
-
inline bool hasFiltered() const
Check for presence of filtered track parameters.
- Returns:
True if the filtered component exists.
-
inline bool hasJacobian() const
Check for presence of a transport Jacobian.
- Returns:
True if a Jacobian is stored.
-
inline bool hasPredicted() const
Check for presence of predicted track parameters.
- Returns:
True if the predicted component exists.
-
inline bool hasPrevious() const
Check whether this state links to a previous state.
- Returns:
True if the previous index is valid.
-
inline bool hasProjector() const
Check for presence of a measurement projector.
- Returns:
True if projector indices are stored.
-
inline bool hasSmoothed() const
Check for presence of smoothed track parameters.
- Returns:
True if the smoothed component exists.
-
inline ConstCovariance jacobian() const
Returns the jacobian from the previous trackstate to this one.
Note
Const version
- Returns:
The jacobian matrix
-
inline Covariance jacobian()
requires (!ReadOnly) Returns the jacobian from the previous trackstate to this one.
Note
Mutable version
- Returns:
The jacobian matrix
-
inline ConstParametersMap parameters() const
Access the best available parameters (smoothed, filtered, or predicted).
- Returns:
Bound parameter map for the state.
-
inline double pathLength() const
Retrieve the accumulated path length.
- Returns:
Path length stored on the state.
-
inline double &pathLength()
requires (!read_only) Retrieve a mutable reference to the accumulated path length.
- Returns:
Mutable path length.
-
inline ConstParametersMap predicted() const
Access the predicted parameter vector.
- Returns:
Bound parameter map for the predicted state.
-
inline ParametersMap predicted()
requires (!read_only) Access the predicted parameter vector.
- Returns:
Mutable bound parameter map for the predicted state.
-
inline ConstCovarianceMap predictedCovariance() const
Access the predicted covariance matrix.
- Returns:
Bound covariance map for the predicted state.
-
inline CovarianceMap predictedCovariance()
requires (!read_only) Access the predicted covariance matrix.
- Returns:
Mutable bound covariance map for the predicted state.
-
inline TrackIndexType previous() const
Retrieve the previous track state index in the linked trajectory.
- Returns:
Index of the previous state or
kTrackIndexInvalid.
-
inline TrackIndexType &previous()
requires (!read_only) Retrieve a mutable reference to the previous track state index.
- Returns:
Mutable index of the previous state.
-
template<std::size_t measdim>
inline FixedBoundSubspaceHelper<measdim> projectorSubspaceHelper() const Creates a fixed size subspace helper.
- Returns:
The subspace helper
-
inline VariableBoundSubspaceHelper projectorSubspaceHelper() const
Creates a variable size subspace helper.
- Returns:
The subspace helper
-
template<std::size_t measdim>
inline SubspaceIndices<measdim> projectorSubspaceIndices() const Returns the projector subspace indices.
- Returns:
The projector subspace indices
-
inline BoundSubspaceIndices projectorSubspaceIndices() const
Decode the measurement projector indices.
- Returns:
Bound parameter indices used for projection.
- template<std::ranges::sized_range index_range_t> inline void setProjectorSubspaceIndices (const index_range_t &subspaceIndices) requires(!read_only &&std
Store subspace indices describing the measurement projector.
- Template Parameters:
index_range_t – Range of indices to encode.
- Parameters:
subspaceIndices – Collection of bound indices forming the projector rows.
-
inline ConstParametersMap smoothed() const
Access the smoothed parameter vector.
- Returns:
Bound parameter map for the smoothed state.
-
inline ParametersMap smoothed()
requires (!read_only) Access the smoothed parameter vector.
- Returns:
Mutable bound parameter map for the smoothed state.
-
inline ConstCovarianceMap smoothedCovariance() const
Access the smoothed covariance matrix.
- Returns:
Bound covariance map for the smoothed state.
-
inline CovarianceMap smoothedCovariance()
requires (!read_only) Access the smoothed covariance matrix.
- Returns:
Mutable bound covariance map for the smoothed state.
-
inline const MultiTrajectory<Trajectory> &trajectory() const
Return a const reference to the underlying backend container.
- Returns:
A const reference to the backend container
-
inline MultiTrajectory<Trajectory> &trajectory()
requires (!ReadOnly) Return a mutable reference to the underlying backend container.
- Returns:
A reference to the backend container
-
inline ConstTrackStateTypeMap typeFlags() const
Retrieve the track-state type flags.
- Returns:
Bit mask describing the state type.
Public Static Attributes
Friends
- friend class Acts::MultiTrajectory< Trajectory >
-
class TrackingGeometry
The TrackingGeometry class is the owner of the constructed TrackingVolumes.
It enables both, a global search for an asociatedVolume (respectively, if existing, a global search of an associated Layer or the next associated Layer), such as a continuous navigation by BoundarySurfaces between the confined TrackingVolumes.
Public Types
Public Functions
Constructor.
- Parameters:
highestVolume – is the world volume
materialDecorator – is a dediated decorator that can assign surface or volume based material to the TrackingVolume
hook – Identifier hook to be applied to surfaces
logger – instance of a logger (defaulting to the “silent” one)
close – If true, run the Gen1 geometry closure
-
~TrackingGeometry()
Destructor.
- template<typename Callable> inline void apply (Callable &&callable) const requires(detail
Apply an arbitrary callable as a visitor to the tracking volume.
Note
The visitor can be overloaded on any of the arguments that the methods in
TrackingGeometryMutableVisitorreceive.- Parameters:
callable – The callable to apply
- template<typename Callable> inline void apply (Callable &&callable) requires(detail
Apply an arbitrary callable as a visitor to the tracking volume.
Note
The visitor can be overloaded on any of the arguments that the methods in
TrackingGeometryVisitorreceive.- Parameters:
callable – The callable to apply
-
void apply(TrackingGeometryMutableVisitor &visitor)
Apply a visitor to the tracking volume.
- Parameters:
visitor – The visitor to apply
-
void apply(TrackingGeometryVisitor &visitor) const
Apply a visitor to the tracking volume.
- Parameters:
visitor – The visitor to apply
-
const Layer *associatedLayer(const GeometryContext &gctx, const Vector3 &gp) const
Forward the associated Layer information.
- Parameters:
gctx – is the context for this request (e.g. alignment)
gp – is the global position of the call
- Returns:
plain pointer to assocaiated layer
-
const Portal *findPortal(std::string_view tag) const
Search for a portal that was tagged with the given label during the blueprint construction (see Acts::Experimental::PortalDesignatorBlueprintNode).
- Parameters:
tag – the tag assigned to the portal
- Return values:
nullptr – if no portal carries the tag
pointer – to the tagged portal otherwise.
-
const Surface *findSurface(GeometryIdentifier id) const
Search for a surface with the given identifier.
- Parameters:
id – is the geometry identifier of the surface
- Return values:
nullptr – if no such surface exists
pointer – to the found surface otherwise.
-
const TrackingVolume *findVolume(GeometryIdentifier id) const
Search for a volume with the given identifier.
- Parameters:
id – is the geometry identifier of the volume
- Return values:
nullptr – if no such volume exists
pointer – to the found volume otherwise.
-
const TrackingVolume *findVolumeByName(std::string_view name) const
Search for the first volume with the given name.
- Parameters:
name – is the volume name to search for
- Return values:
nullptr – if no volume carries the name
pointer – to the first matching volume otherwise.
-
const std::unordered_map<GeometryIdentifier, const Surface*> &geoIdSurfaceMap() const
Access to the GeometryIdentifier - Surface association map.
- Returns:
Const reference to the geometry ID to surface map
-
GeometryVersion geometryVersion() const
Return the generation of this
TrackingGeometry- Returns:
the generation of this
TrackingGeometry
-
TrackingVolume *highestTrackingVolume()
Access to the world volume.
- Returns:
plain pointer to the world volume
-
const TrackingVolume *highestTrackingVolume() const
Access to the world volume.
- Returns:
plain pointer to the world volume
-
std::shared_ptr<const TrackingVolume> highestTrackingVolumePtr() const
Access to the world volume.
- Returns:
shared pointer to the world volume
-
const TrackingVolume *lowestTrackingVolume(const GeometryContext &gctx, const Vector3 &gp) const
return the lowest tracking Volume
- Parameters:
gctx – The current geometry context object, e.g. alignment
gp – is the global position of the call
- Returns:
plain pointer to the lowest TrackingVolume
-
template<SurfaceVisitor visitor_t>
inline void visitSurfaces(visitor_t &&visitor) const Visit all sensitive surfaces.
Note
If a context is needed for the visit, the visitor has to provide this, e.g. as a private member
- Template Parameters:
visitor_t – Type of the callable visitor
- Parameters:
visitor – The callable. Will be called for each sensitive surface that is found, a selection of the surfaces can be done in the visitor
-
template<SurfaceVisitor visitor_t>
inline void visitSurfaces(visitor_t &&visitor, bool restrictToSensitives) const Visit all reachable surfaces.
Note
If a context is needed for the visit, the visitor has to provide this, e.g. as a private member
- Template Parameters:
visitor_t – Type of the callable visitor
- Parameters:
visitor – The callable. Will be called for each reachable surface that is found, a selection of the surfaces can be done in the visitor
restrictToSensitives – If true, only sensitive surfaces are visited
-
template<TrackingVolumeVisitor visitor_t>
inline void visitVolumes(visitor_t &&visitor) const Visit all reachable tracking volumes.
Note
If a context is needed for the visit, the visitor has to provide this, e.g. as a private member
- Template Parameters:
visitor_t – Type of the callable visitor
- Parameters:
visitor – The callable. Will be called for each reachable volume that is found, a selection of the volumes can be done in the visitor
-
void visualize(IVisualization3D &helper, const GeometryContext &gctx, const ViewConfig &viewConfig = s_viewVolume, const ViewConfig &portalViewConfig = s_viewPortal, const ViewConfig &sensitiveViewConfig = s_viewSensitive) const
Visualize a tracking geometry including substructure.
- Parameters:
helper – The visualization helper that implement the output
gctx – The geometry context
viewConfig – Global view config
portalViewConfig – View config for portals
sensitiveViewConfig – View configuration for sensitive surfaces
-
class TrackingVolume : public Acts::Volume
Full Volume description used in Tracking, it inherits from Volume to get the geometrical structure.
information / internal navigation with in 5 different ways:A TrackingVolume at navigation level can provide the (layer) material
The TrackingVolume can also be a simple container of other TrackingVolumes--- a) Static confinement of Layers --- b) detached sub volumes --- b) unordered (arbitrarily oriented) layers --- d) unordered sub volumes --- e) unordered layers AND unordered subvolumes
In addition it is capable of holding a subarray of Layers and TrackingVolumes.
Unnamed Group
-
const Layer *associatedLayer(const GeometryContext &gctx, const Vector3 &position) const
Interface of
TrackingVolumein the Gen1 geometry model.Note
This interface is being replaced, and is subject to removal Return the associated Layer to the global position
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the associated global position
- Returns:
plain pointer to layer object
Resolves the volume into (compatible) Layers.
This is the method for the propagator/extrapolator
- Template Parameters:
options_t – Type of navigation options object for decomposition
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – Position for the search
direction – Direction for the search
options – The templated navigation options
- Returns:
vector of compatible intersections with layers
Returns all boundary surfaces sorted by the user.
- Template Parameters:
options_t – Type of navigation options object for decomposition
sorter_t – Type of the boundary surface sorter
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – The position for searching
direction – The direction for searching
options – The templated navigation options
logger – A
Loggerinstance
- Returns:
is the templated boundary intersection
-
const LayerArray *confinedLayers() const
Return the confined static layer array - if it exists.
- Returns:
the BinnedArray of static layers if exists
-
std::shared_ptr<const TrackingVolumeArray> confinedVolumes() const
Return the confined volumes of this container array - if it exists.
- Returns:
Shared pointer to array of contained tracking volumes or nullptr
-
MutableTrackingVolumeVector denseVolumes() const
Return the confined dense volumes.
- Returns:
Vector of pointers to dense tracking volumes
-
const TrackingVolumeBoundaries &boundarySurfaces() const
Method to return the BoundarySurfaces.
- Returns:
Reference to vector of boundary surface pointers
Set the boundary surface material description.
The material is usually derived in a complicated way and loaded from a framework given source. As various volumes could potentially share the the same material description, it is provided as a shared object
- Parameters:
surfaceMaterial – Material description of this volume
bsFace – Specifies which boundary surface to assign the material to
-
void glueTrackingVolume(const GeometryContext &gctx, BoundarySurfaceFace bsfMine, TrackingVolume *neighbor, BoundarySurfaceFace bsfNeighbor)
Glue another tracking volume to this one.
if common face is set the glued volumes are sharing the boundary, down to the last navigation volume
- Parameters:
gctx – The current geometry context object, e.g. alignment
bsfMine – is the boundary face indicator where to glue
neighbor – is the TrackingVolume to be glued
bsfNeighbor – is the boundary surface of the neighbor
Glue another tracking volume to this one.
if common face is set the glued volumes are sharing the boundary, down to the last navigation volume
- Parameters:
gctx – The current geometry context object, e.g. alignment
bsfMine – is the boundary face indicator where to glue
neighbors – are the TrackingVolumes to be glued
bsfNeighbor – are the boundary surface of the neighbors
Provide a new BoundarySurface from the glueing.
- Parameters:
bsf – is the boundary face indicator where to glue
bs – is the new boundary surface
checkmaterial – is a flag how to deal with material, if true:
if the old boundary surface had a material description but the new one has not, keep the current one
in all other cases just assign the new boundary surface
-
void registerGlueVolumeDescriptor(std::unique_ptr<GlueVolumesDescriptor> gvd)
Register the outside glue volumes - ordering is in the TrackingVolume Frame:
negativeFaceXY
(faces YZ, ZY, radial faces)
positiveFaceXY
- Parameters:
gvd – register a new GlueVolumeDescriptor
-
void clearBoundarySurfaces()
Clear boundary surfaces for this tracking volume.
-
GlueVolumesDescriptor &glueVolumesDescriptor()
Register the outside glue volumes - ordering is in the TrackingVolume Frame:
negativeFaceXY
(faces YZ, ZY, radial faces)
positiveFaceXY
- Returns:
Reference to the glue volumes descriptor
-
void visualize(IVisualization3D &helper, const GeometryContext &gctx, const ViewConfig &viewConfig, const ViewConfig &portalViewConfig, const ViewConfig &sensitiveViewConfig) const
Produces a 3D visualization of this tracking volume.
- Parameters:
helper – The visualization helper describing the output format
gctx – The geometry context
viewConfig – The view configuration
portalViewConfig – View configuration for portals
sensitiveViewConfig – View configuration for sensitive surfaces
Access the navigation policy if any that is registered on this volume.
- Returns:
a pointer to the navigation policy, or nullptr if none is set
Access the navigation policy if any that is registered on this volume.
- Returns:
a pointer to the navigation policy, or nullptr if none is set
Register a navigation policy with this volume.
The argument can not be nullptr.
- Parameters:
policy – is the navigation policy to be registered
Populate the navigation stream with navigation candidates from this volume.
Internally, this consults the registered navigation policy, where the default is a noop.
- Parameters:
gctx – The current geometry context object, e.g. alignment
args – are the navigation arguments
state – is the navigation policy state
stream – is the navigation stream to be updated
logger – is the logger
Public Types
-
using MutablePortalRange = detail::TransformRange<detail::Dereference, std::vector<std::shared_ptr<Portal>>>
Type alias for mutable range of portals in tracking volume.
-
using MutableSurfaceRange = detail::TransformRange<detail::Dereference, std::vector<std::shared_ptr<Surface>>>
Type alias for mutable range of surfaces in tracking volume.
-
using MutableVolumeRange = detail::TransformRange<detail::Dereference, std::vector<std::unique_ptr<TrackingVolume>>>
Type alias for mutable range of tracking volumes in container.
-
using PortalRange = detail::TransformRange<detail::ConstDereference, const std::vector<std::shared_ptr<Portal>>>
Type alias for const range of portals in tracking volume.
-
using SurfaceRange = detail::TransformRange<detail::ConstDereference, const std::vector<std::shared_ptr<Surface>>>
Type alias for const range of surfaces in tracking volume.
-
using VolumeRange = detail::TransformRange<detail::ConstDereference, const std::vector<std::unique_ptr<TrackingVolume>>>
Type alias for const range of tracking volumes in container.
Public Functions
-
TrackingVolume() = delete
-
TrackingVolume(const TrackingVolume&) = delete
Constructor for a container Volume.
vacuum filled volume either as a for other tracking volumes
- Parameters:
transform – is the global 3D transform to position the volume in space
volbounds – is the description of the volume boundaries
volumeName – is a string identifier
Constructor for a full equipped Tracking Volume.
- Parameters:
transform – is the global 3D transform to position the volume in space
volumeBounds – is the description of the volume boundaries
volumeMaterial – is are materials of the tracking volume
staticLayerArray – is the confined layer array (optional)
containedVolumeArray – are the sub volumes if the volume is a container
denseVolumeVector – The contained dense volumes
volumeName – is a string identifier
-
explicit TrackingVolume(const Volume &volume, const std::string &volumeName = "undefined")
Constructor from a regular volume.
- Parameters:
volume – is the volume to be converted
volumeName – is a string identifier
-
TrackingVolume(TrackingVolume&&) noexcept
Move constructor for transferring ownership of tracking volume resources.
Constructor for an aligned container volume container Volume.
vacuum filled volume either as a for other tracking volumes
- Parameters:
placement – is the volume placement object dynamically positioning the volume in space
volbounds – is the description of the volume boundaries
volumeName – is a string identifier
-
~TrackingVolume() override
Add a portal to this tracking volume.
- Parameters:
portal – The portal to add
Add a surface to this tracking volume.
- Parameters:
surface – The surface to add
-
TrackingVolume &addVolume(std::unique_ptr<TrackingVolume> volume)
Add a child volume to this tracking volume.
Note
The
volumewill have its mother volume assigned tothis. It will throw ifvolumealready has a mother volume set- Parameters:
volume – The volume to add
- Returns:
Reference to the added volume
- template<typename Callable> inline void apply (Callable &&callable) const requires(detail
Apply an arbitrary callable as a visitor to the tracking volume.
Note
The visitor can be overloaded on any of the arguments that the methods in
TrackingGeometryMutableVisitorreceive.- Parameters:
callable – The callable to apply
- template<typename Callable> inline void apply (Callable &&callable) requires(detail
Apply an arbitrary callable as a visitor to the tracking volume.
Note
The visitor can be overloaded on any of the arguments that the methods in
TrackingGeometryVisitorreceive.- Parameters:
callable – The callable to apply
-
void apply(TrackingGeometryMutableVisitor &visitor)
Apply a mutable visitor to the tracking volume.
- Parameters:
visitor – The visitor to apply
-
void apply(TrackingGeometryVisitor &visitor) const
Apply a visitor to the tracking volume.
- Parameters:
visitor – The visitor to apply
Set the volume material description.
The material is usually derived in a complicated way and loaded from a framework given source. As various volumes could potentially share the the same material description, it is provided as a shared object
- Parameters:
material – Material description of this volume
-
bool hasMaterial() const
Check if the volume has an associated material description.
- Returns:
True if the volume has an associated material, false otherwise
-
const TrackingVolume *lowestTrackingVolume(const GeometryContext &gctx, const Vector3 &position, const double tol = 0.) const
Return the associated sub Volume, returns THIS if no subVolume exists.
- Parameters:
gctx – The current geometry context object, e.g. alignment
position – is the global position associated with that search
tol – Search position tolerance for dense volumes
- Returns:
plain pointer to associated with the position
-
TrackingVolume *motherVolume()
Return the MotherVolume - if it exists.
- Returns:
Mutable pointer to mother volume or nullptr if this is the root volume
-
const TrackingVolume *motherVolume() const
Return the MotherVolume - if it exists.
- Returns:
Pointer to mother volume or nullptr if this is the root volume
-
TrackingVolume &operator=(const TrackingVolume&) = delete
-
TrackingVolume &operator=(TrackingVolume&&) noexcept
Move assignment operator for transferring ownership of tracking volume resources.
- Returns:
Reference to this TrackingVolume after move assignment
-
MutablePortalRange portals()
Return mutable view of the registered portals under this tracking volume.
- Returns:
the range of portals
-
PortalRange portals() const
Return all portals registered under this tracking volume.
- Returns:
the range of portals
-
void setMotherVolume(TrackingVolume *mvol)
Set the MotherVolume.
- Parameters:
mvol – is the mother volume
-
void setVolumeName(std::string_view volumeName)
Set the volume name to
volumeName.- Parameters:
volumeName – is the new name of
-
MutableSurfaceRange surfaces()
Return mutable view of the registered surfaces under this tracking volume.
- Returns:
the range of surfaces
-
SurfaceRange surfaces() const
Return all surfaces registered under this tracking volume.
- Returns:
the range of surfaces
-
template<SurfaceVisitor visitor_t>
inline void visitSurfaces(visitor_t &&visitor) const Visit all sensitive surfaces.
Note
If a context is needed for the visit, the vistitor has to provide this, e.g. as a private member
- Template Parameters:
visitor_t – Type of the callable visitor
- Parameters:
visitor – The callable. Will be called for each sensitive surface that is found, a selection of the surfaces can be done in the visitor
-
template<SurfaceVisitor visitor_t>
inline void visitSurfaces(visitor_t &&visitor, bool restrictToSensitives) const Visit all reachable surfaces.
Note
If a context is needed for the visit, the vistitor has to provide this, e.g. as a private member
- Template Parameters:
visitor_t – Type of the callable visitor
- Parameters:
visitor – The callable. Will be called for each reachable surface that is found, a selection of the surfaces can be done in the visitor
restrictToSensitives – If true, only sensitive surfaces are visited
-
template<TrackingVolumeVisitor visitor_t>
inline void visitVolumes(visitor_t &&visitor) const Visit all reachable tracking volumes.
Note
If a context is needed for the visit, the vistitor has to provide this, e.g. as a private member
- Template Parameters:
visitor_t – Type of the callable visitor
- Parameters:
visitor – The callable. Will be called for each reachable volume that is found, a selection of the volumes can be done in the visitor
-
const IVolumeMaterial *volumeMaterial() const
Return the material of the volume.
- Returns:
Pointer to volume material or nullptr if no material assigned
-
const std::shared_ptr<const IVolumeMaterial> &volumeMaterialPtr() const
Return the material of the volume as shared pointer.
- Returns:
Shared pointer to volume material
-
const std::string &volumeName() const
Returns the VolumeName - for debug reason, might be depreciated later.
- Returns:
Reference to the volume name string
-
MutableVolumeRange volumes()
Return mutable view of the registered volumes under this tracking volume.
- Returns:
the range of volumes
-
VolumeRange volumes() const
Return all volumes registered under this tracking volume.
- Returns:
the range of volumes
-
const Layer *associatedLayer(const GeometryContext &gctx, const Vector3 &position) const
-
class TrapezoidBounds : public Acts::PlanarBounds
Bounds for a trapezoidal, planar Surface.
Public Types
Public Functions
-
explicit TrapezoidBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor for symmetric Trapezoid - from fixed size array.
- Parameters:
values – the values to be stream in
-
explicit TrapezoidBounds(double halfXnegY, double halfXposY, double halfY, double rotAngle = 0.) noexcept(false)
Constructor for symmetric Trapezoid.
- Parameters:
halfXnegY – minimal half length X, definition at negative Y
halfXposY – maximal half length X, definition at positive Y
halfY – half length Y - defined at x=0
rotAngle – rotation angle of the bounds w.r.t coordinate axes
-
virtual const RectangleBounds &boundingBox() const final
Bounding box parameters.
- Returns:
rectangle bounds for a bounding box
-
virtual Vector2 center() const final
Calculate the center of the surface bounds in local coordinates.
This method returns a representative center point of the bounds region. The exact definition varies by bounds type and coordinate system:
Cartesian bounds (Rectangle, Diamond, Trapezoid):
Returns the geometric center or center of symmetry
For symmetric shapes: center of bounding box or origin (0,0)
Polar/Cylindrical bounds (Radial, Cylinder, Cone):
Returns (r, phi) where r is average radius, phi is average angle
Coordinates are in the bounds’ natural coordinate system
Complex bounds (Annulus, ConvexPolygon):
Annulus: Pre-calculated from corner vertices (accounts for coordinate transforms)
Polygon: Average of all vertices (vertex centroid, not area centroid)
Infinite bounds: Returns conceptual center at (0,0)
Note
The returned point is guaranteed to be a reasonable representative center, but may not be the true geometric centroid for all shapes.
Note
For TrapezoidBounds: returns center of symmetry (0,0), accounting for rotation
- Returns:
Vector2 representing the center position in local coordinates
-
virtual Vector2 closestPoint(const Vector2 &lposition, const SquareMatrix2 &metric) const final
Calculates the closest point on the bounds to a given local position.
- Parameters:
lposition – is the local position
metric – to be used for the distance calculation
- Returns:
the closest point on the bounds
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The bound value at the specified index
-
virtual bool inside(const Vector2 &lposition) const final
Inside check for the bounds object.
The orientation of the Trapezoid is according to the figure above, in words: the shorter of the two parallel sides of the trapezoid intersects with the negative \( y \) - axis of the local frame.
The cases are:
(0)
\( y \) or \( x \)bounds are 0 || 0
(1) the local position is outside
\( y \)bounds
(2) the local position is inside
\( y \) bounds, but outside maximum \( x \)bounds
(3) the local position is inside
\( y \) bounds AND inside minimum \( x \)bounds
(4) the local position is inside
\( y \) bounds AND inside maximum \( x \) bounds, so that it depends on the \( eta \) coordinate (5) the local position fails test of (4)The inside check is done using single equations of straight lines and one has to take care if a point lies on the positive \( x \) half area(I) or the negative one(II). Denoting \( |x_{min}| \) and \( | x_{max} | \) as
minHalfXrespectivelymaxHalfX, such as \( | y_{H} | \) ashalfY, the equations for the straing lines in (I) and (II) can be written as:(I): \( y = \kappa_{I} x + \delta_{I} \)
(II): \( y = \kappa_{II} x + \delta_{II} \)
,
where
\( \kappa_{I} = - \kappa_{II} = 2 \frac{y_{H}}{x_{max} - x_{min}} \) and \( \delta_{I} = \delta_{II} = - \frac{1}{2}\kappa_{I}(x_{max} + x_{min}) \)
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition) const = 0
Inside check for the bounds object.
- Parameters:
lposition – is the local position
- Returns:
true if the local position is inside the bounds
-
bool inside(const Vector2 &lposition, const BoundaryTolerance &boundaryTolerance) const
Inside check for the bounds object given a boundary tolerance.
- Parameters:
lposition – is the local position
boundaryTolerance – is the boundary tolerance object
- Returns:
true if the local position is inside the bounds and tolerance
-
virtual std::ostream &toStream(std::ostream &sl) const final
Output Method for std::ostream.
- Parameters:
sl – is the ostream to be dumped into
- Returns:
Modified ostream for chaining
-
inline virtual BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
the bounds type
-
virtual std::vector<double> values() const final
Access method for bound values, this is a dynamically sized vector containing the parameters needed to describe these bounds.
- Returns:
of the stored values for this SurfaceBounds object
-
virtual std::vector<Vector2> vertices(unsigned int ignoredSegments = 0u) const final
Return the vertices.
Note
the number of segments is ignored in this representation
- Parameters:
ignoredSegments – is and ignored parameter used to describe the number of segments to approximate curved sectors.
- Returns:
vector for vertices in 2D
-
explicit TrapezoidBounds(const std::array<double, eSize> &values) noexcept(false)
-
class TrapezoidVolumeBounds : public Acts::VolumeBounds
Bounds for a trapezoidal shaped Volume, the orientedSurface(…) method creates a vector of 6 surfaces:
BoundarySurfaceFace [index]:
negativeFaceXY [0] : Trazpezoidal Acts::PlaneSurface, parallel to \( xy \) plane at negative \(z\)
positiveFaceXY [1] : Trazpezoidal Acts::PlaneSurface, parallel to \( xy \) plane at positive \(z\)
trapezoidFaceAlpha [2] : Rectangular Acts::PlaneSurface, attached to [0] and [1] at negative \(x\) (associated to alpha)
trapezoidFaceBeta [3] : Rectangular Acts::PlaneSurface, attached to [0] and [1] at positive \( x\) (associated to beta)
negativeFaceZX [4] : Rectangular Acts::PlaneSurface, parallel to \( zx \) plane at negative \(y\)
positiveFaceZX [5] : Rectangular Acts::PlaneSurface, parallel to \( zx \) plane at positive \(y\)
PositiveZFaceXY--------+ PositiveYFaceZX | | TrapezoidFaceAlpha | v | | +----------------------------------+ | v | | | + +--+------------------------------++ | | /| / | +-+ | | / | / | +-+ | + +---+ / | / | +-+ | ++ | / | / +----------------------+-+---------+ +-+| | / | / +-+ +-+ | | / + / +-+ +-+ | | / / / +-+ +-+ | v/ / / +-+ +-+ + / / / +-+ +-+ +- / / / +------------------+-+------------++ +-+ +-+ / / / / +-+ +-+ +-+ +-+ / / / / +-+ +-+ +-+ +-+ / / +----X-----------------+ +-+ +-+ +-+ + / / +-+ +-+ +-+ | +--X------X------------+ +-+ -+ +-+ | | / / | +-+ + +-+ | |/ / | +-+ | +-+ ^ | X / | +-+ | +-+ | |/| / | +-+ | +-+ | + | / | +-+ | +-+ | z ^ ^ y +---X------------------+ +-+ ^ |-+ +-----+ | / / ^ +-+ | + | | / +---------++-----------+ | | |/ | | | X------> x NegativeYFaceZX NegativeZFaceXY | TrapezoidFaceBeta
Public Types
-
enum BoundValues
for access / streaming
Values:
-
enumerator eHalfLengthXnegY
halflength in x at negative y
-
enumerator eHalfLengthXposY
halflength in x at positive y
-
enumerator eHalfLengthY
halflength in y
-
enumerator eHalfLengthZ
halflength in z
-
enumerator eAlpha
opening angle alpha (in point A)
-
enumerator eBeta
opening angle beta (in point B)
-
enumerator eSize
length of the bounds vector
-
enumerator eHalfLengthXnegY
-
enum class Face : unsigned int
Enum describing the possible faces of a trapezoidal volume.
Note
These values are synchronized with the BoundarySurfaceFace enum. Once Gen1 is removed, this can be changed.
Values:
-
enumerator NegativeZFaceXY
-
enumerator PositiveZFaceXY
-
enumerator TrapezoidFaceAlpha
-
enumerator TrapezoidFaceBeta
-
enumerator NegativeYFaceZX
-
enumerator PositiveYFaceZX
-
enumerator NegativeZFaceXY
Public Functions
-
TrapezoidVolumeBounds() = delete
-
inline explicit TrapezoidVolumeBounds(const std::array<double, eSize> &values) noexcept(false)
Constructor - from a fixed size array.
- Parameters:
values – The bound values
-
TrapezoidVolumeBounds(const TrapezoidVolumeBounds &trabo) = default
Copy constructor.
- Parameters:
trabo – Source trapezoidal volume bounds to copy from
-
TrapezoidVolumeBounds(double minhalex, double haley, double halez, double alpha, double beta) noexcept(false)
Constructor - the trapezoid boundaries (arbitrary trapezoid)
- Parameters:
minhalex – is the half length in x at minimal y
haley – is the half length in y
halez – is the half length in z
alpha – is the opening angle at -x,-y
beta – is the opening angle at +x,-y
-
TrapezoidVolumeBounds(double minhalex, double maxhalex, double haley, double halez) noexcept(false)
Constructor - the trapezoid boundaries (symmetric trapezoid)
- Parameters:
minhalex – is the half length in x at minimal y
maxhalex – is the half length in x at maximal y
haley – is the half length in y
halez – is the half length in z
-
~TrapezoidVolumeBounds() override = default
Default destructor.
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const final
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline double get(BoundValues bValue) const
Access to the bound values.
- Parameters:
bValue – the class nested enum for the array access
- Returns:
The bound value at the specified index
-
virtual bool inside(const Vector3 &pos, double tol = 0.) const override
This method checks if position in the 3D volume frame is inside the cylinder.
- Parameters:
pos – is the global position to be checked
tol – is the tolerance applied
- Returns:
boolean indicator if position is inside
-
TrapezoidVolumeBounds &operator=(const TrapezoidVolumeBounds &trabo) = default
Copy assignment operator.
- Parameters:
trabo – Source trapezoidal volume bounds to assign from
- Returns:
Reference to this object
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const override
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
virtual std::ostream &toStream(std::ostream &os) const override
Output Method for std::ostream.
- Parameters:
os – is the output stream
- Returns:
Modified ostream for chaining
-
inline virtual VolumeBounds::BoundsType type() const final
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const final
Return the bound values as dynamically sized vector.
- Returns:
this returns a copy of the internal values
Warning
doxygenclass: Cannot find class “Acts::TryAllNavigator” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygenclass: Cannot find class “Acts::TryAllOverstepNavigator” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
class VectorMultiTrajectory : public Acts::detail_vmt::VectorMultiTrajectoryBase, public Acts::MultiTrajectory<VectorMultiTrajectory>
In-memory transient multi-trajectory implementation using
std::vectoras backend.
-
class Volume : public Acts::GeometryObject
It inherits from GeometryObject for geometry identification.
Base class for all volumes inside the tracking realm, it defines the interface for inherited Volume classes regarding the geometrical information.
Subclassed by Acts::TrackingVolume, Acts::VolumeStack
Public Types
Public Functions
Explicit constructor with shared arguments.
- Parameters:
transform – is the transform to position the volume in 3D space
volbounds – is the volume boundary definitions
-
Volume(const Volume &vol) noexcept = default
Copy Constructor.
- Parameters:
vol – is the source volume for the copy
Constructor that connects the volume to an external alignment I.e.
the volume may move with the alignment of the surfaces The placement of the volume is delegated to the positioner
- Parameters:
positioner – Reference to the object aligning the volume
volbounds – is the volume boundary definitions
-
~Volume() noexcept override = default
Set volume bounds and update volume bounding boxes implicitly.
- Parameters:
volbounds – The volume bounds to be assigned
-
BoundingBox boundingBox(const GeometryContext &gctx, const Vector3 &envelope = Vector3::Zero()) const
Construct bounding box for this shape.
- Parameters:
envelope – Optional envelope to add / subtract from min/max
gctx – The current geometry context object, e.g. alignment
- Returns:
Constructed bounding box pointing to this volume
-
Vector3 center(const GeometryContext &gctx) const
Get the center position of the volume.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
Const reference to the center position vector
-
const Transform3 &globalToLocalTransform(const GeometryContext &gctx) const
Get the transformation matrix from the global experiment’s frame to the local volume frame.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
The global to local transformation matrix
-
bool inside(const GeometryContext &gctx, const Vector3 &gpos, double tol = 0.) const
Inside() method for checks.
- Parameters:
gctx – The current geometry context object, e.g. alignment
gpos – is the position to be checked
tol – is the tolerance parameter
- Returns:
boolean indicator if the position is inside
-
bool isAlignable() const
Is the volume connected to the experiment’s alignment system (I.e.
it’s constructed with a volumePlacement)
- Returns:
Whether the volume can be externally aligned
-
const Transform3 &localToGlobalTransform(const GeometryContext &gctx) const
Get the transformation matrix from the local volume frame to the global experiment’s frame.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
The local to global transformation matrix
-
Volume &operator=(const Volume &vol) noexcept = default
Assignment operator.
- Parameters:
vol – is the source volume to be copied
- Returns:
Reference to this volume for assignment chaining
-
Volume &operator=(Volume &&other) noexcept = default
Move assignment operator.
- Parameters:
other – is the other volume to be moved
- Returns:
Reference to this volume for assignment chaining
-
bool operator==(const Volume &other) const
Compare this volume with another for equality.
- Parameters:
other – The other volume to compare with
- Returns:
True if the volumes are equal
-
BoundingBox orientedBoundingBox() const
Construct oriented bounding box for this shape.
Note
This will build an oriented bounding box with an envelope value of (0.05, 0.05, 0.05)mm
- Returns:
Constructed oriented bounding box pointing to this volume
-
virtual Vector3 referencePosition(const GeometryContext &gctx, AxisDirection aDir) const override
The binning position method.
as default the center is given, but may be overloaded
- Parameters:
gctx – The current geometry context object, e.g. alignment
aDir – is the axis direction for the reference position
- Returns:
vector 3D that can be used for the binning
-
void setTransform(const Transform3 &transform)
Set the transform matrix for the volume and update internal state.
- Parameters:
transform – The new transform matrix to be applied
-
Volume shifted(const GeometryContext &gctx, const Transform3 &shift) const
Shift the volume by a transform.
- Parameters:
shift – is the transform to shift the volume by
gctx – The current geometry context object, e.g. alignment
- Returns:
The shifted volume
Set the volume bounds and optionally also update the volume transform.
- Parameters:
gctx – The current geometry context object, e.g. alignment
volbounds – The volume bounds to be assigned
transform – The transform to be assigned, can be optional
logger – A logger object to log messages
-
void visualize(IVisualization3D &helper, const GeometryContext &gctx, const ViewConfig &viewConfig) const
Produces a 3D visualization of this volume.
- Parameters:
helper – The visualization helper describing the output format
gctx – The geometry context
viewConfig – The view configuration
-
VolumeBounds &volumeBounds()
Get mutable access to the volume bounds.
- Returns:
Reference to the volume bounds object
-
const VolumeBounds &volumeBounds() const
Get the volume bounds that define the shape of the volume.
- Returns:
Const reference to the volume bounds object
-
std::shared_ptr<VolumeBounds> volumeBoundsPtr()
Get shared pointer to the mutable volume bounds.
- Returns:
Shared pointer to the volume bounds object
-
std::shared_ptr<const VolumeBounds> volumeBoundsPtr() const
Get shared pointer to the const volume bounds.
- Returns:
Const shared pointer to the volume bounds object
-
VolumePlacementBase *volumePlacement()
VolumePlacement object that dynamically aligns the volume.
- Returns:
Pointer to the VolumePlacement (Might be nullptr)
-
const VolumePlacementBase *volumePlacement() const
VolumePlacement object that dynamically aligns the volume.
- Returns:
Pointer to the VolumePlacement (Might be nullptr)
-
class VolumeBounds
Pure Absract Base Class for Volume bounds.
Acts::VolumeBounds are a set of up to six confining Surfaces that are stored in a std::vector. Each type of Acts::VolumeBounds has to implement a orientedSurfaces() and a inside() method.
The Volume, retrieving a set of Surfaces from the VolumeBounds, can turn the Surfaces into BoundarySurfaces.
Subclassed by Acts::ConeVolumeBounds, Acts::CuboidVolumeBounds, Acts::CutoutCylinderVolumeBounds, Acts::CylinderVolumeBounds, Acts::DiamondVolumeBounds, Acts::GenericCuboidVolumeBounds, Acts::TrapezoidVolumeBounds
Public Types
Public Functions
-
VolumeBounds() = default
-
virtual ~VolumeBounds() = default
-
virtual Volume::BoundingBox boundingBox(const Transform3 *trf = nullptr, const Vector3 &envelope = {0, 0, 0}, const Volume *entity = nullptr) const = 0
Construct bounding box for this shape.
- Parameters:
trf – Optional transform
envelope – Optional envelope to add / subtract from min/max
entity – Entity to associate this bounding box with
- Returns:
Constructed bounding box
-
inline virtual std::vector<AxisDirection> canonicalAxes() const
Get the canonical axis direction that fully describe the shape’s extent.
Note
This is the default implementation that returns the bounding box binning. Individual shapes should override this method
- Returns:
vector of canonical axis directions
-
virtual bool inside(const Vector3 &gpos, double tol = 0.) const = 0
Checking if position given in volume frame is inside.
- Parameters:
gpos – is the global position to be checked
tol – is the tolerance applied for the inside check
- Returns:
boolean indicating if the position is inside
-
virtual std::vector<OrientedSurface> orientedSurfaces(const Transform3 &transform = Transform3::Identity()) const = 0
Oriented surfaces, i.e.
the decomposed boundary surfaces and the according navigation direction into the volume given the normal vector on the surface
It will throw an exception if the orientation prescription is not adequate
- Parameters:
transform – is the 3D transform to be applied to the boundary surfaces to position them in 3D space
- Returns:
a vector of surfaces bounding this volume
-
inline virtual double referenceBorder(AxisDirection aDir) const
Binning borders in double.
- Parameters:
aDir – is the binning schema used
- Returns:
float offset to be used for the binning
-
inline virtual Vector3 referenceOffset(AxisDirection aDir) const
Binning offset - overloaded for some R-binning types.
- Parameters:
aDir – is the binning schema used
- Returns:
vector 3D to be used for the binning
-
virtual std::ostream &toStream(std::ostream &sl) const = 0
Output Method for std::ostream, to be overloaded by child classes.
- Parameters:
sl – is the output stream to be dumped into
- Returns:
Modified ostream for chaining
-
virtual BoundsType type() const = 0
Return the bounds type - for persistency optimization.
- Returns:
is a BoundsType enum
-
virtual std::vector<double> values() const = 0
Access method for bound values, this is a dynamically sized vector containing the parameters needed to describe these bounds.
- Returns:
of the stored values for this SurfaceBounds object
Public Static Attributes
-
static const std::vector<std::string> s_boundsTypeNames
Static member to get the name of the BoundsType.
-
VolumeBounds() = default
-
class VolumeStack : public Acts::Volume
A stack of volumes.
Note
This is a base class for the different types of volume stacks
Subclassed by Acts::CuboidVolumeStack, Acts::CylinderVolumeStack
-
class DD4hepDetectorElement : public ActsPlugins::TGeoDetectorElement
DetectorElement class implementation for DD4hep geometry.
DetectorElement plugin for DD4hep detector elements. DD4hep is based on TGeo shapes, therefore the DD4hepDetectorElement inherits from TGeoDetectorElement in order to perform the conversion.
The full geometrical information is provided by the TGeoDetectorElement. The DD4hepDetectorElement extends the TGeoDetectorElement by containing a segmentation for the readout.
Public Types
-
using ContextType = Acts::GeometryContext
Broadcast the context type.
-
using DD4hepVolumeID = dd4hep::DDSegmentation::VolumeID
Type alias for DD4hep volume identifier used in segmentation.
-
using Store = std::map<std::string, std::vector<std::shared_ptr<DD4hepDetectorElement>>>
Define a string based store.
Public Functions
Constructor.
Example options are:
”XYZ” -> identical frame definition (default value)
”YZX” -> node y axis is tracking x axis, etc.
”XzY” -> negative node z axis is tracking y axis, etc.
Note
In the translation from a 3D geometry (TGeo) which only knows tubes to a 2D geometry (Tracking geometry) a distinction if the module should be described as a cylinder or a disc surface needs to be done. Since this information can not be taken just from the geometry description (both can be described as TGeoTubeSeg), one needs to set the flag ‘isDisc’ in case a volume with shape
TGeoTubeSegshould be translated to a disc surface. Per default it will be translated into a cylindrical surface.- Parameters:
scalor – is the scale factor for unit conversion if needed
material – Optional material of detector element
detElement – The DD4hep DetElement which should be associated to an ACTS surface
axes – is the axis orientation with respect to the tracking frame it is a string of the three characters x, y and z (standing for the three axes) There is a distinction between capital and lower case characters :
capital -> positive orientation of the axis
lower case -> negative orientation of the axis
-
~DD4hepDetectorElement() override = default
-
inline const dd4hep::DetElement &sourceElement() const
Give access to the DD4hep detector element.
- Returns:
Reference to the underlying DD4hep detector element
-
using ContextType = Acts::GeometryContext
-
class Geant4DetectorElement : public Acts::SurfacePlacementBase
Detector element representative for Geant4 sensitive elements.
Public Types
-
using ContextType = Acts::GeometryContext
Broadcast the context type.
Public Functions
Constructor with arguments.
- Parameters:
surface – the surface representing this detector element
g4physVol – the physical volume representing this detector element
toGlobal – the global transformation before the volume
thickness – the thickness of this detector element
-
const G4VPhysicalVolume &g4PhysicalVolume() const
- Returns:
to the Geant4 physical volume
-
inline virtual bool isSensitive() const final
Is the detector element a sensitive element.
- Returns:
True as this is always sensitive
-
virtual const Acts::Transform3 &localToGlobalTransform(const Acts::GeometryContext &gctx) const override
Return local to global transform associated with this detector element.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
Reference to the local-to-global transformation matrix
-
virtual const Acts::Surface &surface() const override
Return surface associated with this detector element.
- Returns:
Const reference to the associated surface
-
virtual Acts::Surface &surface() override
Non-const access to surface associated with this detector element.
- Returns:
Mutable reference to the associated surface
-
virtual double thickness() const
Return the thickness of this detector element.
- Returns:
The thickness value in length units
-
using ContextType = Acts::GeometryContext
-
class Geant4DetectorSurfaceFactory
A factory to convert Geant4 physical volumes into Geant4 detector elements.
Public Types
-
using ElementFactory = std::function<std::shared_ptr<Geant4DetectorElement>(std::shared_ptr<Acts::Surface>, const G4VPhysicalVolume&, const Acts::Transform3&, double)>
Type alias for detector element factory function.
-
using Geant4SensitiveSurface = std::tuple<std::shared_ptr<Geant4DetectorElement>, std::shared_ptr<Acts::Surface>>
Type alias for sensitive surface with detector element.
Public Functions
-
Geant4DetectorSurfaceFactory() = delete
The Geant4 detector element factory.
-
inline explicit Geant4DetectorSurfaceFactory(const Config &config, std::unique_ptr<const Acts::Logger> mlogger = Acts::getDefaultLogger("Geant4DetectorSurfaceFactory", Acts::Logging::INFO))
The Geant4 detector element factory with a configuration.
- Parameters:
config – the configuration of the factory
mlogger – a screen output logger
-
void construct(Cache &cache, const G4Transform3D &g4ToGlobal, const G4VPhysicalVolume &g4PhysVol, const Options &option)
Construction method of the detector elements.
- Parameters:
cache – [in,out] into which the Elements are filled
g4ToGlobal – the transformation to global
g4PhysVol – the current physical volume
option – the factory creation option
-
struct Cache
Nested cache that records the conversion status.
Public Members
-
std::size_t convertedMaterials = 0
matching and conversion statistics: materials
-
std::size_t convertedSurfaces = 0
matching and conversion statistics: surfaces
-
std::size_t matchedG4Volumes = 0
matching and conversion statistics: volumes
-
std::vector<Geant4PassiveSurface> passiveSurfaces
The created non-const surfaces - for further processing,.
-
std::vector<Geant4SensitiveSurface> sensitiveSurfaces
The created detector elements - for the detector store.
-
std::size_t convertedMaterials = 0
-
struct Config
Nested configuration struct that holds global lifetime configuration.
-
struct Options
Nested option struct that allows per call changeable configuration.
Public Members
-
double convertedMaterialThickness = -1
Converted material thickness (< 0 indicates keeping original thickness)
-
bool convertMaterial = false
Convert the material.
-
std::shared_ptr<IGeant4PhysicalVolumeSelector> passiveSurfaceSelector = nullptr
A selector for passive surfaces.
-
double scaleConversion = 1.
Convert the length scale.
-
std::shared_ptr<IGeant4PhysicalVolumeSelector> sensitiveSurfaceSelector = nullptr
A selector for sensitive surfaces.
-
double convertedMaterialThickness = -1
-
using ElementFactory = std::function<std::shared_ptr<Geant4DetectorElement>(std::shared_ptr<Acts::Surface>, const G4VPhysicalVolume&, const Acts::Transform3&, double)>
-
class IGeant4PhysicalVolumeSelector
Interface class for selectors from physical volumes.
Subclassed by ActsPlugins::Geant4PhysicalVolumeSelectors::AllSelector, ActsPlugins::Geant4PhysicalVolumeSelectors::NameSelector, ActsPlugins::Geant4PhysicalVolumeSelectors::PositionSelector
-
class TGeoDetectorElement : public Acts::SurfacePlacementBase
DetectorElement plugin for ROOT TGeo shapes.
Added possibility to hand over transformation matrix.
Subclassed by ActsPlugins::DD4hepDetectorElement
Public Types
-
using ContextType = Acts::GeometryContext
Broadcast the context type.
-
using Identifier = identifier_type
Identifier alias.
-
using identifier_diff = long long
Identifier difference type.
-
using identifier_type = unsigned long long
Identifier type.
Public Functions
Constructor with pre-computed disk surface.
Note
this detector element constructor needs everything pre-computed.
- Parameters:
identifier – is the detector identifier
tGeoNode – is the TGeoNode which should be represented
tgTransform – the transform of this detector element
tgBounds – the bounds of this surface
tgThickness – the thickness of this detector element
Constructor with pre-computed surface.
Note
this detector element constructor needs everything pre-computed.
- Parameters:
identifier – is the detector identifier
tGeoNode – is the TGeoNode which should be represented
tgTransform – the transform of this detector element
tgBounds – the bounds of this surface
tgThickness – the thickness of this detector element
Constructor.
Note
this constructor used auto-translation
Note
This parameter only needs to be set for plane modules
Note
In the translation from a 3D geometry (TGeo) which only knows tubes to a 2D geometry (Tracking geometry) a distinction if the module should be described as a cylinder or a disc surface needs to be done. Since this information can not be taken just from the geometry description (both can be described as TGeoTubeSeg), one needs to set the flag ‘isDisc’ in case a volume with shape
TGeoTubeSegshould be translated to a disc surface. Per default it will be translated into a cylindrical surface.- Parameters:
identifier – is the detector identifier
tGeoNode – is the TGeoNode which should be represented
tGeoMatrix – The Matrix to global (i.e. ACTS transform)
axes – is the axis orientation with respect to the tracking frame it is a string of the three characters x, y and z (standing for the three axes) there is a distinction between capital and lower case characters :
capital -> positive orientation of the axis
lower case -> negative orientation of the axis example options are “XYZ” -> identical frame definition (default value) “YZX” -> node y axis is tracking x axis, etc. “XzY” -> negative node z axis is tracking y axis, etc.
scalor – is the scale factor for unit conversion if needed
material – Possible material of detector element
-
~TGeoDetectorElement() override
-
inline Identifier identifier() const
Get the detector element identifier.
- Returns:
The unique identifier for this detector element
-
inline virtual bool isSensitive() const final
Is the detector element a sensitive element.
- Returns:
Always true for this detector element type
-
inline virtual const Acts::Transform3 &localToGlobalTransform(const Acts::GeometryContext &gctx) const override
Return local to global transform associated with this identifier.
- Parameters:
gctx – The current geometry context object, e.g. alignment
- Returns:
Reference to the transformation matrix from local to global coordinates
-
const Acts::Transform3 &nominalTransform() const
Return the nominal - non-contextual transform.
- Returns:
Reference to the nominal transformation matrix
-
inline virtual const Acts::Surface &surface() const override
Return surface associated with this detector element.
- Returns:
Const reference to the surface
-
inline virtual Acts::Surface &surface() override
Return surface associated with this detector element.
Note
this is the non-const access
- Returns:
Mutable reference to the surface
-
inline const TGeoNode &tgeoNode() const
Return the TGeoNode for back navigation.
- Returns:
Reference to the underlying TGeoNode
-
inline double thickness() const
Returns the thickness of the module.
- Returns:
Thickness of the detector element in units of length
-
using ContextType = Acts::GeometryContext
Enums
-
enum class Acts::AxisBoundaryType
Enum which determines how the axis handle its outer boundaries possible values values.
Values:
-
enumerator Open
Default behaviour: out of bounds positions are filled into the over or underflow bins.
-
enumerator Bound
Out-of-bounds positions resolve to first/last bin respectively.
-
enumerator Closed
Out-of-bounds positions resolve to the outermost bin on the opposite side.
-
enumerator Open
-
enum class Acts::AxisDirection : int
to specify a local axis direction
Values:
-
enumerator AxisX
AxisX, AxisY, AxisZ are the cartesian directions in the local frame.
-
enumerator AxisY
-
enumerator AxisZ
-
enumerator AxisR
AxisR is a radial direction.
-
enumerator AxisPhi
AxisPhi is the azimuthal direction.
-
enumerator AxisRPhi
AxisRPhi is the radial-azimuthal direction.
-
enumerator AxisTheta
AxisTheta is the polar angle direction.
-
enumerator AxisEta
AxisEta is the pseudorapidity direction.
-
enumerator AxisMag
AxisMag is the magnitude of the vector.
-
enumerator AxisX
-
enum class Acts::AxisType
Enum which determines the binning type of the axis.
Values:
-
enumerator Equidistant
An axis where all bins have the same size.
-
enumerator Variable
An axis where bins can have different sizes.
-
enumerator Equidistant
-
enum Acts::BinningType
, BinningOption & BinningAccess
BinningType:
Enumeration to qualify the binning type for the use of the LayerArrayCreator and the TrackingVolumeArrayCreator
BinningOption: open: [0,max] closed: 0 -> nextbin -> max -> 0
AxisDirection necessary access to global positions
Values:
-
enumerator equidistant
-
enumerator arbitrary
-
enum Acts::BoundIndices
Components of a bound track parameters vector.
To be used to access components by named indices instead of just numbers. This must be a regular
enumand not a scopedenum classto allow implicit conversion to an integer. The enum value are thus visible directly innamespace Actsand are prefixed to avoid naming collisions.Values:
-
enumerator eBoundLoc0
-
enumerator eBoundLoc1
-
enumerator eBoundPhi
-
enumerator eBoundTheta
-
enumerator eBoundQOverP
-
enumerator eBoundTime
-
enumerator eBoundSize
-
enumerator eBoundLoc0
-
enum class Acts::ComponentMergeMethod
Available reduction methods for the reduction of a Gaussian mixture.
Values:
-
enumerator eMean
-
enumerator eMaxWeight
-
enumerator eMean
-
enum Acts::FreeIndices
Components of a free track parameters vector.
To be used to access components by named indices instead of just numbers. This must be a regular
enumand not a scopedenum classto allow implicit conversion to an integer. The enum value are thus visible directly innamespace Actsand are prefixed to avoid naming collisions.Values:
-
enumerator eFreePos0
-
enumerator eFreePos1
-
enumerator eFreePos2
-
enumerator eFreeTime
-
enumerator eFreeDir0
-
enumerator eFreeDir1
-
enumerator eFreeDir2
-
enumerator eFreeQOverP
-
enumerator eFreeSize
-
enumerator eFreePos0
-
enum class Acts::MagneticFieldError
Error codes for magnetic field operations.
Values:
-
enumerator OutOfBounds
The lookup position was outside of the validitiy domain of the underlying magnetic field instance.
-
enumerator NotImplemented
An operation for this magnetic field type is not implemented.
-
enumerator OutOfBounds
-
enum class Acts::TrackStatePropMask : std::uint8_t
Collection of bit masks to enable steering which components of a track state should be initialized, and which should be left invalid.
These mask values can be combined using binary operators, so (TrackStatePropMask::Predicted | TrackStatePropMask::Jacobian) will instruct allocating storage for both predicted parameters (including covariance) and a jacobian. The enum is used as a strong type wrapper around the bits to prevent autoconversion from integer
Values:
-
enumerator None
-
enumerator Predicted
-
enumerator Filtered
-
enumerator Smoothed
-
enumerator Jacobian
-
enumerator Calibrated
-
enumerator All
-
enumerator None
Functions
-
inline const Logger &Acts::CylinderVolumeBuilder::logger() const
Private access to the logger.
- Returns:
a const reference to the logger
-
std::unique_ptr<const Logger> Acts::getDefaultLogger(const std::string &name, const Logging::Level &lvl, std::ostream *log_stream = &std::cout)
get default debug output logger
This function returns a pointer to a Logger instance with the following decorations enabled:
time stamps
name of logging instance
debug level
- Parameters:
name – [in] name of the logger instance
lvl – [in] debug threshold level
log_stream – [in] output stream used for printing debug messages
- Returns:
pointer to logging instance
-
const Logger &Acts::getDummyLogger()
Get a dummy logger that discards all output.
- Returns:
Reference to dummy logger instance
-
PolynomialBetheHeitlerApprox Acts::makeDefaultBetheHeitlerApprox(bool clampToRange = false)
Creates a PolynomialBetheHeitlerApprox object based on a default configuration, stored as static data in the source code.
This may not be an optimal configuration, but allows running the GSF without loading external files.
- Parameters:
clampToRange – Whether to clamp values to the valid range
- Returns:
PolynomialBetheHeitlerApprox with default configuration parameters
-
void Acts::reduceMixtureLargestWeights(std::vector<GsfComponent> &cmpCache, std::size_t maxCmpsAfterMerge, const Surface &surface)
Very simple mixture reduction method: Just removes the components with the smallest weight until the required number of components is reached.
- Parameters:
cmpCache – the component collection
maxCmpsAfterMerge – the number of components we want to reach
surface – the surface type on which the components are (unused here)
-
void Acts::reduceMixtureWithKLDistance(std::vector<GsfComponent> &cmpCache, std::size_t maxCmpsAfterMerge, const Surface &surface)
Greedy component reduction algorithm.
Reduces the components with the minimal symmetric KL-distance (applied only to the q/p-dimension) until the required number of components is reached.
- Parameters:
cmpCache – the component collection
maxCmpsAfterMerge – the number of components we want to reach
surface – the surface type on which the components are
Global method which creates the TrackingGeometry from DD4hep input.
This method returns a std::unique_ptr of the TrackingGeometry from the World DD4hep DetElement.
- Attention
The default thickness should be set thin enough that no touching or overlapping with the next layer can happen.
Note
Possible binningtypes:
arbitrary - of the sizes if the surfaces and the distance in between vary. This mode finds out the bin boundaries by scanning through the surfaces.
equidistant - if the sensitive surfaces are placed equidistantly
Note
equidistant binningtype is recommended because it is faster not only while building the geometry but also for look up during the extrapolation
Note
Layers containing surfaces per default are not allowed to be attached to each other (navigation will fail at this point). However, to allow material layers (not containing surfaces) to be attached to each other, this default thickness is needed. In this way, the layer will be thin (with space to the next layer), but the material will have the ‘real’ thickness.
- Parameters:
worldDetElement – [in] the DD4hep DetElement of the world
logger – [in] A logger instance geometry building
bTypePhi – [in] is how the sensitive surfaces (modules) should be binned in a layer in phi direction.
bTypeR – [in] is how the sensitive surfaces (modules) should be binned in a layer in r direction
bTypeZ – [in] is how the sensitive surfaces (modules) should be binned in a layer in z direction
layerEnvelopeR – [in] the tolerance added to the geometrical extension in r of the layers contained to build the volume envelope around
layerEnvelopeZ – [in] the tolerance added to the geometrical extension in z of the layers contained to build the volume envelope around
defaultLayerThickness – [in] In case no surfaces (to be contained by the layer) are handed over, the layer thickness will be set to this value
sortSubDetectors – [in]
std::functionwhich should be used in order to sort all sub detectors (=all Detelements collected by the methodcollectSubDetectors()) from bottom to top to ensure correct wrapping of the volumes, which is needed for navigation. Therefore the different hierarchies need to be sorted ascending. The default is sorting by ID.gctx – The geometry context to use
matDecorator – is the material decorator that loads material maps
geometryIdentifierHook – Hook to apply to surfaces during geometry closure.
detectorElementFactory – Factory function to create ActsPlugins::DD4hepDetectorElement or derived classes
- Throws:
std::logic_error – if an error in the translation occurs
- Pre:
Before using this method make sure, that the preconditions described in DD4hepPlugins are met.
- Returns:
std::unique_ptr to the full TrackingGeometry
The Tracking geometry needs to be built from bottom to top to ensure Navigation. Therefore the different hierarchies need to be sorted ascending. Per default the sub detectors are sorted by the id of their dd4hep::DetElement. In case another sorting needs to be applied, the users can provide their own function
Structs
Warning
doxygenstruct: Cannot find class “Acts::ActorList” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
template<typename track_container_t>
struct CombinatorialKalmanFilterExtensions Extension struct which holds the delegates to customize the CKF behavior.
Public Types
-
using BranchStopper = Delegate<BranchStopperResult(const TrackProxy&, const TrackStateProxy&)>
Type alias for branch stopper delegate function.
-
using BranchStopperResult = CombinatorialKalmanFilterBranchStopperResult
Type alias for branch stopper result enumeration.
-
using TrackProxy = typename track_container_t::TrackProxy
Type alias for track proxy from the container.
-
using TrackStateCreator = Delegate<Result<CkfTypes::BranchVector<TrackIndexType>>(const GeometryContext &geoContext, const CalibrationContext &calibrationContext, const Surface &surface, const CkfTypes::BoundState &boundState, TrackIndexType prevTip, std::vector<TrackStateProxy> &trackStateCandidates, traj_t &trajectory, const Logger &logger)>
Delegate the extension of the trajectory onto the given surface to an external unit.
Note
Expected to create track states for measurements associated to the given surface which match the given bound state. Moreover the The “filtered” data is not expected to be set, but the outlier flag should be set for states that are considered to be outlier.
- Param geoContext:
The current geometry context
- Param calibrationContext:
pointer to the current calibration context
- Param surface:
the surface at which new track states are to be created
- Param boundState:
the current bound state of the trajectory
- Param prevTip:
Index pointing at previous trajectory state (i.e. tip)
- Param trackStateCandidates:
a temporary buffer that can be used to collect track states
- Param trajectory:
the trajectory to which the new states are to be added
- Param logger:
a logger for messages
- Return:
indices of new track states which extend the trajectory given by prevTip
-
using TrackStateProxy = typename track_container_t::TrackStateProxy
Type alias for track state proxy from the container.
-
using traj_t = typename track_container_t::TrackStateContainerBackend
Type alias for track state container backend.
Public Members
-
BranchStopper branchStopper = {DelegateFuncTag<voidBranchStopper>{}}
The branch stopper is called during the filtering by the Actor.
-
TrackStateCreator createTrackStates
The delegate to create new track states.
Note
a reference implementation can be found in TrackStateCreator which makes uses of MeasurementSelector and SourceLinkAccessor
-
using BranchStopper = Delegate<BranchStopperResult(const TrackProxy&, const TrackStateProxy&)>
-
template<typename track_container_t>
struct CombinatorialKalmanFilterOptions Combined options for the combinatorial Kalman filter.
- Template Parameters:
source_link_iterator_t – Type of the source link iterator
track_container_t – Type of the track container
Public Types
-
using TrackStateContainerBackend = typename track_container_t::TrackStateContainerBackend
Type alias for track state container backend.
-
using TrackStateProxy = typename track_container_t::TrackStateProxy
Type alias for track state proxy from the container.
Public Functions
-
CombinatorialKalmanFilterOptions() = delete
Contexts are required and the options must not be default-constructible.
-
inline CombinatorialKalmanFilterOptions(const GeometryContext &gctx, const MagneticFieldContext &mctx, std::reference_wrapper<const CalibrationContext> cctx, CombinatorialKalmanFilterExtensions<track_container_t> extensions_, const PropagatorPlainOptions &pOptions, bool mScattering = true, bool eLoss = true)
PropagatorOptions with context.
- Parameters:
gctx – The geometry context for this track finding/fitting
mctx – The magnetic context for this track finding/fitting
cctx – The calibration context for this track finding/fitting
extensions_ – The extension struct
pOptions – The plain propagator options
mScattering – Whether to include multiple scattering
eLoss – Whether to include energy loss
Public Members
-
std::reference_wrapper<const CalibrationContext> calibrationContext
context object for the calibration
-
bool energyLoss = true
Whether to consider energy loss.
-
CombinatorialKalmanFilterExtensions<track_container_t> extensions
The filter extensions.
-
std::reference_wrapper<const GeometryContext> geoContext
Context object for the geometry.
-
std::reference_wrapper<const MagneticFieldContext> magFieldContext
Context object for the magnetic field.
-
bool multipleScattering = true
Whether to consider multiple scattering.
-
PropagatorPlainOptions propagatorPlainOptions
The trivial propagator options.
-
bool skipPrePropagationUpdate = false
Skip the pre propagation call.
This effectively skips the first surface
Note
This is useful if the first surface should not be considered in a second reverse pass
-
struct State
Nested State struct.
It acts as an internal state which is created for every propagation/extrapolation step and keep thread-local navigation information
Public Functions
-
inline explicit State(const Options &options_)
Constructor from options.
- Parameters:
options_ – The navigator options
-
inline bool endOfSurfaces() const
Check if we have reached the end of the surface sequence.
- Returns:
True if no more surfaces remain in the propagation direction
-
inline const Surface &navSurface() const
Get the current navigation surface.
- Returns:
Reference to the surface at the current surface index
-
inline void nextSurface()
Move to the next surface in the sequence Increments or decrements surface index based on propagation direction.
-
inline int remainingSurfaces() const
Get the number of surfaces remaining in the sequence.
- Returns:
Number of surfaces left to process in the propagation direction
-
inline void resetSurfaceIndex()
Reset the surface index to the initial position Sets index to before first surface (forward) or after last surface (backward)
Public Members
-
const Surface *currentSurface = nullptr
Navigation state - external interface: the current surface.
-
bool navigationBreak = false
Navigation state - external interface: a break has been detected.
-
Options options
Configuration options for the direct navigator.
-
NavigatorStatistics statistics
Navigation statistics.
-
std::int32_t surfaceIndex = -1
Index of the next surface to try.
Note
-1 means before the first surface in the sequence and size() means after the last surface in the sequence
-
inline explicit State(const Options &options_)
-
struct EigenStepperDefaultExtension
Default evaluator of the k_i’s and elements of the transport matrix D of the RKN4 stepping.
This is a pure implementation by textbook.
-
struct EigenStepperDenseExtension
Evaluator of the k_i’s and elements of the transport matrix D of the RKN4 stepping.
This implementation involves energy loss due to ionisation, bremsstrahlung, pair production and photonuclear interaction in the propagation and the Jacobian. These effects will only occur if the propagation is in a TrackingVolume with attached material.
Public Members
-
double currentMomentum = 0.
Momentum at a certain point.
-
EigenStepperDefaultExtension defaultExtension
Fallback extension.
-
double dgdqopValue = 0.
Derivative d(dEds)d(q/p) evaluated at the initial point.
-
std::array<double, 4> dLdl = {}
Derivatives dLambda’’dlambda at each sub-step point.
-
std::array<double, 4> dPds = {}
Derivatives dPds at each sub-step.
-
std::array<double, 4> energy = {}
Energy at each sub-step.
-
double g = 0.
Derivative dEds at the initial point.
-
double initialMomentum = 0.
Particles momentum at k1.
-
std::array<double, 4> Lambdappi = {}
Lambda’’_i.
-
Material material = Material::Vacuum()
Material that will be passed TODO : Might not be needed anymore.
-
std::array<double, 4> qop = {}
q/p at each sub-step
-
std::array<double, 4> tKi = {}
k_i equivalent for the time propagation
-
double currentMomentum = 0.
-
template<typename propagator_t, typename traj_t>
struct GaussianSumFitter Gaussian Sum Fitter implementation.
Note
This GSF implementation tries to be as compatible to the KalmanFitter as possible. However, strict compatibility is not garantueed.
Note
Currently there is no possibility to export the states of the individual components from the GSF, the only information returned in the MultiTrajectory are the means of the states. Therefore, also NO dedicated component smoothing is performed as described e.g. by R. Fruewirth.
- Template Parameters:
propagator_t – The propagator type on which the algorithm is built on, usually an instance of Acts::Propagator
traj_t – The MultiTrajectory type (backend)
Public Functions
Constructor with propagator, Bethe-Heitler approximation, and logger.
- Parameters:
propagator – Propagator for track propagation
bha – Bethe-Heitler approximation for energy loss modeling
_logger – Logger for diagnostic output
-
template<typename source_link_it_t, typename start_parameters_t, TrackContainerFrontend track_container_t>
inline auto fit(source_link_it_t begin, source_link_it_t end, const start_parameters_t &sParameters, const GsfOptions<traj_t> &options, const std::vector<const Surface*> &sSequence, track_container_t &trackContainer) const The fit function for the Direct navigator.
- Parameters:
begin – Iterator to the start of source links
end – Iterator to the end of source links
sParameters – Starting track parameters for the fit
options – Options for the GSF fit
sSequence – Sequence of surfaces to navigate through
trackContainer – Container to store the fitted track
- Returns:
Result containing fitted track proxy or error
-
template<typename source_link_it_t, typename start_parameters_t, TrackContainerFrontend track_container_t>
inline auto fit(source_link_it_t begin, source_link_it_t end, const start_parameters_t &sParameters, const GsfOptions<traj_t> &options, track_container_t &trackContainer) const The fit function for the standard navigator.
- Parameters:
begin – Iterator to the start of source links
end – Iterator to the end of source links
sParameters – Starting track parameters for the fit
options – Options for the GSF fit
trackContainer – Container to store the fitted track
- Returns:
Result containing fitted track proxy or error
-
template<typename source_link_it_t, typename start_parameters_t, typename fwd_prop_initializer_t, typename bwd_prop_initializer_t, TrackContainerFrontend track_container_t>
inline Acts::Result<typename track_container_t::TrackProxy> fit_impl(source_link_it_t begin, source_link_it_t end, const start_parameters_t &sParameters, const GsfOptions<traj_t> &options, const fwd_prop_initializer_t &fwdPropInitializer, const bwd_prop_initializer_t &bwdPropInitializer, track_container_t &trackContainer) const The generic implementation of the fit function.
TODO check what this function does with the referenceSurface is e.g. the first measurementSurface
- Parameters:
begin – Iterator to the start of source links
end – Iterator to the end of source links
sParameters – Starting track parameters for the fit
options – Options for the GSF fit
fwdPropInitializer – Initializer for forward propagation
bwdPropInitializer – Initializer for backward propagation
trackContainer – Container to store the fitted track
- Returns:
Result containing fitted track proxy with forward and backward propagation results
Public Members
-
std::shared_ptr<const BetheHeitlerApprox> m_betheHeitlerApproximation
The fitter holds the instance of the bethe heitler approx.
-
propagator_t m_propagator
The propagator instance used by the fit function.
-
template<typename traj_t>
struct GsfOptions Options for configuring the Gaussian-sum filter fit.
Public Functions
-
inline GsfOptions(const GeometryContext &geoCtxt, const MagneticFieldContext &magFieldCtxt, const CalibrationContext &calibCtxt)
Constructor from contexts.
- Parameters:
geoCtxt – The geometry context
magFieldCtxt – The magnetic field context
calibCtxt – The calibration context
Public Members
-
bool abortOnError = false
Abort the fit if an error occurs.
-
std::reference_wrapper<const CalibrationContext> calibrationContext
Calibration context for this fit.
-
ComponentMergeMethod componentMergeMethod = ComponentMergeMethod::eMaxWeight
Method for merging components.
-
bool disableAllMaterialHandling = false
Disable all material handling during the fit.
-
std::string_view finalMultiComponentStateColumn = ""
Column name for final multi-component state storage.
-
std::reference_wrapper<const GeometryContext> geoContext
Geometry context for this fit.
-
std::reference_wrapper<const MagneticFieldContext> magFieldContext
Magnetic field context for this fit.
-
std::size_t maxComponents = 4
Maximum number of components in the mixture.
-
PropagatorPlainOptions propagatorPlainOptions
Propagator options.
-
double reverseFilteringCovarianceScaling = 100.0
Scaling factor for the covariance matrix before reverse filtering.
Note that the default value is not tuned and might need adjustment for different use cases.
-
bool useExternalSurfaces = true
Whether to use the external-surfaces mechanism of the navigator which switches off the boundary-check for measurement surfaces.
-
double weightCutoff = 1.e-4
Minimum weight required to keep a component.
-
inline GsfOptions(const GeometryContext &geoCtxt, const MagneticFieldContext &magFieldCtxt, const CalibrationContext &calibCtxt)
-
struct MultiStepperSurfaceReached : public Acts::ForcedSurfaceReached
Aborter that stops when all components reach the target surface.
Public Functions
-
MultiStepperSurfaceReached() = default
boolean operator for abort condition without using the result
- Template Parameters:
propagator_state_t – Type of the propagator state
stepper_t – Type of the stepper
navigator_t – Type of the navigator
- Parameters:
state – [inout] The propagation state object
stepper – [in] Stepper used for propagation
navigator – [in] Navigator used for the propagation
logger – a logger instance
- Returns:
True if the abort condition is met, false otherwise
Public Members
-
bool averageOnSurface = true
If this is set, we are also happy if the mean of the components is on the surface.
How the averaging is performed depends on the stepper implementation
-
double averageOnSurfaceTolerance = 0.2
A configurable tolerance within which distance to the intersection we consider the surface as reached.
Has no effect if averageOnSurface is false
-
MultiStepperSurfaceReached() = default
-
struct State
Nested State struct.
It acts as an internal state which is created for every propagation and meant to keep thread-local navigation information.
Public Functions
-
inline explicit State(const Options &options_)
Constructor with navigation options.
- Parameters:
options_ – The navigation options for this state
-
inline NavigationTarget &navBoundary()
Get reference to current navigation boundary.
- Returns:
Reference to current boundary intersection
-
inline NavigationTarget &navCandidate()
Get reference to current navigation candidate.
- Returns:
Reference to current boundary intersection
-
inline NavigationTarget &navLayer()
Get reference to current navigation layer.
- Returns:
Reference to current layer intersection
-
inline NavigationTarget &navSurface()
Get reference to current navigation surface.
- Returns:
Reference to current navigation target
-
inline void resetAfterLayerSwitch()
Reset navigation state after switching layers.
-
inline void resetAfterVolumeSwitch()
Reset navigation state after switching volumes.
-
inline void resetForRenavigation()
Completely reset navigation state to initial conditions.
Public Members
-
const Layer *currentLayer = nullptr
Current layer during navigation.
-
const Surface *currentSurface = nullptr
Current surface during navigation.
-
const TrackingVolume *currentVolume = nullptr
Current volume during navigation.
-
std::vector<std::pair<const Surface*, bool>> freeCandidates = {}
Free candidates not part of the tracking geometry.
and a boolean indicating whether the surface has already been reached during propagation
-
std::vector<const Surface*> freeSurfaces
Surfaces that are not part of the tracking geometry.
-
NavigationBoundaries navBoundaries = {}
the vector of boundary surfaces to work through
-
std::optional<std::size_t> navBoundaryIndex
the current boundary index of the navigation state
-
std::optional<std::size_t> navCandidateIndex
the current candidate index of the navigation state
-
NavigationCandidates navCandidates = {}
the vector of navigation candidates to work through
-
bool navigationBreak = false
Flag to break navigation loop.
-
std::optional<std::size_t> navLayerIndex
the current layer index of the navigation state
-
NavigationLayers navLayers = {}
the vector of navigation layers to work through
-
std::optional<std::size_t> navSurfaceIndex
the current surface index of the navigation state
-
NavigationSurfaces navSurfaces = {}
the vector of navigation surfaces to work through
-
Options options
Navigation options configuration.
-
NavigationPolicyStateManager policyStateManager
Management of policy state allocation and deallocation.
-
const Layer *startLayer = nullptr
Layer where the navigation started.
-
const Surface *startSurface = nullptr
Surface where the navigation started.
-
const TrackingVolume *startVolume = nullptr
Volume where the navigation started.
-
NavigatorStatistics statistics
Statistics collection for navigation performance.
-
NavigationStream stream
Stream for navigation debugging and monitoring.
-
const Surface *targetSurface = nullptr
Target surface for navigation.
-
inline explicit State(const Options &options_)
Warning
doxygenstruct: Cannot find class “Acts::Neutral” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
struct OrientedSurface
Helper bundle of a surface and its orientation.
Public Members
-
Direction direction = Direction::AlongNormal()
Surface orientation.
-
std::shared_ptr<RegularSurface> surface
The surface.
-
Direction direction = Direction::AlongNormal()
-
struct PathLimitReached
This is the condition that the pathLimit has been reached.
Public Functions
boolean operator for abort condition without using the result
- Template Parameters:
propagator_state_t – Type of the propagator state
stepper_t – Type of the stepper
navigator_t – Type of the navigator
- Parameters:
state – [inout] The propagation state object
stepper – [in] Stepper used for propagation
navigator – [in] Navigator used for propagation
logger – a logger instance
- Returns:
True if path limit exceeded and propagation should abort
Public Members
-
double internalLimit = std::numeric_limits<double>::max()
Internal path limit for loop protection.
-
template<typename stepper_options_t, typename navigator_options_t, typename actor_list_t = ActorList<>>
struct PropagatorOptions : public Acts::detail::PurePropagatorPlainOptions Options for propagate() call.
- Template Parameters:
actor_list_t – List of action types called after each propagation step with the current propagation and stepper state
Public Types
-
using actor_list_type = actor_list_t
Type alias for actor list.
Type alias for navigator options.
-
using stepper_options_type = stepper_options_t
Type alias for stepper options.
Public Functions
-
inline PropagatorOptions(const GeometryContext &gctx, const MagneticFieldContext &mctx)
PropagatorOptions with context.
- Parameters:
gctx – Geometry context for propagation
mctx – Magnetic field context for propagation
-
inline explicit PropagatorOptions(const PropagatorPlainOptions &pOptions)
PropagatorOptions with context and plain options.
- Parameters:
pOptions – Plain options to initialize from
Expand the options with extended actors.
- Template Parameters:
extended_actor_list_t – Type of the new actor list
- Parameters:
extendedActorList – The new actor list to be used (internally)
- Returns:
PropagatorOptions with the extended actor list
-
inline explicit operator PropagatorPlainOptions() const
Convert to plain options.
-
inline void setPlainOptions(const PropagatorPlainOptions &pOptions)
Set the plain options.
- Parameters:
pOptions – The plain options
Public Members
-
actor_list_t actorList
List of actions.
-
std::reference_wrapper<const GeometryContext> geoContext
The context object for the geometry.
-
std::reference_wrapper<const MagneticFieldContext> magFieldContext
The context object for the magnetic field.
Navigator options.
-
stepper_options_t stepping
Stepper options.
-
struct PropagatorPlainOptions : public Acts::detail::PurePropagatorPlainOptions
Holds the generic propagator options.
Public Functions
-
inline PropagatorPlainOptions(const GeometryContext &gctx, const MagneticFieldContext &mctx)
PropagatorPlainOptions with context.
- Parameters:
gctx – Geometry context for propagation
mctx – Magnetic field context for propagation
Public Members
-
std::reference_wrapper<const GeometryContext> geoContext
The context object for the geometry.
-
std::reference_wrapper<const MagneticFieldContext> magFieldContext
The context object for the magnetic field.
Navigator plain options.
-
StepperPlainOptions stepping
Stepper plain options.
-
inline PropagatorPlainOptions(const GeometryContext &gctx, const MagneticFieldContext &mctx)
-
struct SeedConfirmationRangeConfig
Contains parameters for quality seed confirmation.
Note
Requirements on the number of compatible space-points and impact parameters can be defined for different (r, z) regions of the detector (e.g. forward or central region) by SeedConfirmationRange. Seeds are classified as “high-quality” seeds and normal quality seeds. Normal quality seeds are only selected if no other “high-quality” seed has been found for that inner-middle doublet. For optimization reasons, the algorithm only calls the seed confirmation for a certain inner-middle doublet, in case a configurable minimum number of inner-middle-outer triplets have been found.
Public Members
-
float minImpactSeedConf = 1. * Acts::UnitConstants::mm
Minimum impact parameter of seed required in quality seed confirmation.
-
std::size_t nTopForLargeR = 0
Minimum number of compatible outer space-points required in quality seed confirmation if inner space-points radius is larger than rMaxSeedConf.
-
std::size_t nTopForSmallR = 0
Minimum number of compatible outer space-points required in quality seed confirmation if inner space-points radius is smaller than rMaxSeedConf.
-
float rMaxSeedConf = std::numeric_limits<float>::max()
Radius position of inner seed component that is used to split the region of the detector for seed confirmation.
-
float seedConfMaxZOrigin = 150. * Acts::UnitConstants::mm
Maximum longitudinal impact parameter of seed required in quality seed confirmation.
-
float seedConfMinBottomRadius = 60. * Acts::UnitConstants::mm
Minimum radius for inner seed component required in quality seed confirmation.
-
float zMaxSeedConf = std::numeric_limits<float>::max()
Maximum z position of middle component of the seed used to split the region of the detector for seed confirmation.
-
float zMinSeedConf = std::numeric_limits<float>::lowest()
Minimum z position of middle component of the seed used to split the region of the detector for seed confirmation.
-
float minImpactSeedConf = 1. * Acts::UnitConstants::mm
Warning
doxygenstruct: Cannot find class “Acts::SinglyCharged” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
template<typename source_link_iterator_t, typename track_container_t>
struct TrackStateCreator Create track states for selected measurements associated to a surface.
First get a source link range covering relevant measurements associated to the given surface. This task is delegated to a SourceLinkAccessor.
Then create temporary track states for all measurements defined by a source link range, calibrate the measurements and fill the the calibrated data of these track states using a dedicated calibrator
The measurement selection is delegated to a dedicated measurement selector.
Finally add branches to the given trajectory for the selected, temporary track states. The track states of these branches still lack the filtered data which is to be filled by the next stage e.g. the CombinatorialKalmanFilter. All track states, the temporary track states and track states for selected measurements, are created in the given trajectory. The resulting container may become big. Thus, it is advisable to copy selected tracks and their track states to a separate container after each track finding step.
Public Types
-
using BoundState = std::tuple<BoundTrackParameters, BoundMatrix, double>
Type alias for bound state tuple containing parameters, jacobian and path length.
-
using Calibrator = typename KalmanFitterExtensions<TrackStateContainerBackend>::Calibrator
Type alias for calibrator delegate to process measurements from source links.
-
using candidate_container_t = typename std::vector<typename track_container_t::TrackStateProxy>
Type alias for container of candidate track state proxies.
-
using MeasurementSelector = Delegate<Result<std::pair<typename candidate_container_t::iterator, typename candidate_container_t::iterator>>(candidate_container_t &trackStates, bool&, const Logger&)>
Type alias for delegate to select measurements from track state candidates.
-
using SourceLinkAccessor = Delegate<std::pair<source_link_iterator_t, source_link_iterator_t>(const Surface&)>
Type alias for delegate to access source link ranges for a surface.
-
using TrackProxy = typename track_container_t::TrackProxy
Type alias for track proxy from track container.
-
using TrackStateContainerBackend = typename track_container_t::TrackStateContainerBackend
Type alias for track state container backend from track container.
-
using TrackStateProxy = typename track_container_t::TrackStateProxy
Type alias for track state proxy from track container.
Public Functions
-
inline Result<CkfTypes::BranchVector<TrackIndexType>> createSourceLinkTrackStates(const GeometryContext &gctx, const CalibrationContext &calibrationContext, [[maybe_unused]] const Surface &surface, const BoundState &boundState, const source_link_iterator_t &slBegin, const source_link_iterator_t &slEnd, TrackIndexType prevTip, std::vector<TrackStateProxy> &trackStateCandidates, TrackStateContainerBackend &trajectory, const Logger &logger) const
Create track states for selected measurements given by the source links.
- Parameters:
gctx – The current geometry context
calibrationContext – pointer to the current calibration context
surface – the surface the sourceLinks are associated to
boundState – Bound state from the propagation on this surface
slBegin – Begin iterator for sourceLinks
slEnd – End iterator for sourceLinks
prevTip – Index pointing at previous trajectory state (i.e. tip)
trackStateCandidates – a temporary buffer which can be used to to keep track of newly created temporary track states.
trajectory – the trajectory to which new track states for selected measurements will be added
logger – the logger for messages.
- Returns:
Result containing vector of track state indices or error
-
inline Result<CkfTypes::BranchVector<TrackIndexType>> createTrackStates(const GeometryContext &gctx, const CalibrationContext &calibrationContext, [[maybe_unused]] const Surface &surface, const BoundState &boundState, TrackIndexType prevTip, std::vector<TrackStateProxy> &trackStateCandidates, TrackStateContainerBackend &trajectory, const Logger &logger) const
extend the trajectory onto the given surface.
Extend or branch the trajectory onto the given surface. This may create new track states using measurements which match the predicted bound state. This may create multiple branches. The new track states still miss the “filtered” data.
- Parameters:
gctx – The geometry context to be used for this task
calibrationContext – The calibration context used to fill the calibrated data
surface – The surface onto which the trajectory is extended
boundState – the predicted bound state on the given surface
prevTip – the tip of the trajectory which is to be extended
trackStateCandidates – a temporary buffer which can be used to to keep track of newly created temporary track states.
trajectory – the trajectory to be extended.
logger – a logger for messages.
- Returns:
a list of indices of newly created track states which extend the trajectory onto the given surface and match the bound state, or an error.
-
inline Result<CkfTypes::BranchVector<TrackIndexType>> processSelectedTrackStates(typename std::vector<TrackStateProxy>::const_iterator begin, typename std::vector<TrackStateProxy>::const_iterator end, TrackStateContainerBackend &trackStates, bool isOutlier, const Logger &logger) const
Create track states for the given trajectory from candidate track states.
- Parameters:
begin – begin iterator of the list of candidate track states
end – end iterator of the list of candidate track states
trackStates – the trajectory to which the new track states are added
isOutlier – true if the candidate(s) is(are) an outlier(s).
logger – the logger for messages
- Returns:
Result containing vector of track state indices or error
Public Members
-
Calibrator calibrator = {DelegateFuncTag<detail::voidFitterCalibrator<TrackStateContainerBackend>>{}}
The Calibrator is a dedicated calibration algorithm that allows to calibrate measurements using track information, this could be e.g.
sagging for wires, module deformations, etc.
-
MeasurementSelector measurementSelector = {DelegateFuncTag<voidMeasurementSelector>{}}
Delegate for measurement selection on surfaces.
-
SourceLinkAccessor sourceLinkAccessor
The source link accessor will return an source link range for a surface which link to the associated measurements.
Public Static Functions
-
static inline Result<std::pair<typename std::vector<TrackStateProxy>::iterator, typename std::vector<TrackStateProxy>::iterator>> voidMeasurementSelector(typename std::vector<TrackStateProxy> &candidates, bool&, const Logger&)
Default measurement selector which will return all measurements.
- Parameters:
candidates – Measurement track state candidates
- Returns:
Iterator pair representing the range of all candidates
-
struct AllSelector : public ActsPlugins::IGeant4PhysicalVolumeSelector
Struct that selects all G4VPhysicalVolume objects.
Public Functions
-
inline virtual bool select(const G4VPhysicalVolume&) const final
The main interface method.
- Parameters:
g4Phys – the physical volume to be checked
- Returns:
a boolean indicating if it should be selected or not
-
inline virtual bool select(const G4VPhysicalVolume&) const final
-
struct NameSelector : public ActsPlugins::IGeant4PhysicalVolumeSelector
Struct that selects G4VPhysicalVolume objects that match one of the provided names, exact or partially.
Public Functions
-
inline explicit NameSelector(const std::vector<std::string> &ns, bool e = false)
Constructor with arguments.
- Parameters:
ns – the provided list of names
e – whether to select them exact or not
-
virtual bool select(const G4VPhysicalVolume &g4PhysVol) const final
Secect function for the volume.
- Parameters:
g4PhysVol – the volume that is checked
- Returns:
a boolean indicating the selection
-
inline explicit NameSelector(const std::vector<std::string> &ns, bool e = false)
-
struct PositionSelector : public ActsPlugins::IGeant4PhysicalVolumeSelector
Struct that selects G4VPhysicalVolume objects based on the allowed range of their position.
Note
Can be used for preselection of volumes before a KDTree search. This way the memory consumption can be reduced, compromising the execution speed
Note
Careful with axis conventions as Geant4 uses a different one than Acts
Public Functions
-
inline explicit PositionSelector(const std::map<unsigned int, std::tuple<double, double>> &ranges)
Constructor with arguments.
- Parameters:
ranges – the provided map of axes of ranges
-
virtual bool select(const G4VPhysicalVolume &g4PhysVol) const final
Secect function for the volume.
- Parameters:
g4PhysVol – the volume that is checked
- Returns:
a boolean indicating the selection
Public Members
-
std::map<unsigned int, std::tuple<double, double>> m_ranges
Map of axis indices to position ranges for volume selection.
-
inline explicit PositionSelector(const std::map<unsigned int, std::tuple<double, double>> &ranges)
Types
Warning
doxygentypedef: Cannot find typedef “Acts::ActsMatrix” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygentypedef: Cannot find typedef “Acts::ActsSquareMatrix” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
Warning
doxygentypedef: Cannot find typedef “Acts::ActsVector” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
using Acts::AngleAxis3 = Eigen::AngleAxis<double>
Rotation defined by an angle around a rotation axis in 3D.
-
using Acts::BoundMatrix = Matrix<eBoundSize, eBoundSize>
Matrix type for bound track parameter transformations.
-
using Acts::BoundToFreeMatrix = Matrix<eFreeSize, eBoundSize>
Matrix type for mapping from bound to free track parameters.
Warning
doxygentypedef: Cannot find typedef “Acts::BoundTrackParameters” in doxygen xml output for project “Acts” from directory: _build/doxygen-xml
-
using Acts::BoundVector = Vector<eBoundSize>
Vector type for bound track parameters.
-
using Acts::BoundarySurface = BoundarySurfaceT<TrackingVolume>
Type alias for boundary surface with TrackingVolume.
-
using Acts::FreeMatrix = Matrix<eFreeSize, eFreeSize>
Matrix type for free track parameter transformations.
-
using Acts::FreeToBoundMatrix = Matrix<eBoundSize, eFreeSize>
Matrix type for mapping from free to bound track parameters.
-
using Acts::FreeToPathMatrix = Matrix<1, eFreeSize>
Matrix type for mapping from free parameters to path length.
-
using Acts::HashedString = std::uint32_t
Type alias for hashed string representation.
Represents a string as a compile-time hash value for efficient comparison
-
using Acts::Intersection3D = Intersection<3>
Type alias for 3D intersection.
-
typedef BinnedArray<LayerPtr> Acts::LayerArray
A BinnedArray to a std::shared_ptr of a layer.
Layers are constructed with shared_ptr factories, hence the layer array is describes as:
-
typedef detail::SingleComponentReducer<detail::MaxWeightComponent> Acts::MaxWeightReducerLoop
Type alias for loop reducer based on maximum weight.
Reduces multiple loop iterations based on weight criteria
-
using Acts::RotationMatrix2 = SquareMatrix2
2D rotation matrix
-
using Acts::RotationMatrix3 = SquareMatrix3
3D rotation matrix
-
using Acts::SquareMatrix2 = SquareMatrix<2>
2x2 square matrix type, typically used for 2D coordinate covariance
-
using Acts::SquareMatrix3 = SquareMatrix<3>
3x3 square matrix type, typically used for 3D coordinate covariance
-
using Acts::SquareMatrix4 = SquareMatrix<4>
4x4 square matrix type, typically used for 4D coordinate covariance
-
using Acts::SurfaceVector = std::vector<const Surface*>
Vector of pointers to constant Surface objects.
-
using Acts::Transform2 = Eigen::Transform<double, 2, Eigen::AffineCompact>
2D affine transformation stored as a compact 2x3 matrix
-
using Acts::Transform3 = Eigen::Transform<double, 3, Eigen::Affine>
3D affine transformation stored as a 4x4 matrix
-
using Acts::Translation2 = Eigen::Translation<double, 2>
2D translation transformation
-
using Acts::Translation3 = Eigen::Translation<double, 3>
3D translation transformation
-
using Acts::Vector2 = Vector<2>
2-dimensional vector type for 2D coordinates
-
using Acts::Vector3 = Vector<3>
3-dimensional vector type for e.g. spatial coordinates and momenta
-
using Acts::Vector4 = Vector<4>
4-dimensional vector type for space-time coordinates